Ideas page for MRPT Google Summer of Code 2017
Table of contents
- GSoC2017 website. It is fundamental to read all rules and documents from Google before writing a proposal.
- GSoC mailing list: You can ask general questions here.
- GSoC 2017 timeline
- XXXXX: Students can apply in this period only!
Being accepted as a GSoC student is a quite competitive process. Please, if you wish to submit a proposal, consider becoming familiar with the involved technologies first. Simply copying and pasting from this page will not be accepted.
Student projects will be paid only if:
- Midterm (XXX 2017): A pull request is requested that...
- Builds, ideally in travis-ci
- Has, at least, stubbed out new functionality
- Code has appropriate Doxygen documentation
- Has a stubbed out example/tutorial/ROS launch file that builds/runs without errors
- It observes the recommendations in "How to contribute", which include C++ style suggestions.
- End of summer (XXX 2017):
- A complete pull request that builds, full Doxygen documentation, unit test if applicable, complete functionality.
- A video (e.g. on YouTube) demonstrating your code.
- You must already be proficient in C++.
- Take your time to learn about MRPT. Try watching some YouTube videos, reading tutorials, downloading it and launching demo applications, for example. Getting familiar with ROS and MRPT ROS packages would be a plus.
- Take a look at the projects in the "GSoC ideas page". Discuss those of your interest, or your own ideas, in the MRPT forum/mailing list.
- Read carefully about Google's student eligibility rules.
- Sign up in GSoC and post your project proposal to the MRPT Organization. Your proposal should include:
- A coding portfolio of past/current projects.
- Your GitHub/GitLab/... username.
- A detailed description of your project proposal, including initial plans for research directions and a list of key and optional features to be coded as time permits.
- Will you be working full-time on the project during the summer? Will you have other commitments too (a second job, classes, etc)?
- Why do you feel motivated to undertake this particular project? :-)
Rules say that all communications between students and mentors should happen in public: please, use the MRPT mailing list or GitHub comments in pull-requests or commits whenever possible, before and during GSoC.
MRPT provides developers with portable and well-tested applications and C++ libraries covering data structures and algorithms employed in common robotics research areas. ROS (Robot Operating System), supported by the OSRF, provides libraries and tools to help software developers create robot applications. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more.
List of potential mentors (pairing of projects to mentors will be done when Google decides the number of slots assigned to MRPT):
- Jose Luis Blanco (@jlblancoc)
- Hunter Laux (@jolting)
- Javier G. Monroy (@JGMonroy)
- Jesus Briales (@jesusbriales)
- Emilio Sanjurjo (@EmilioSanjurjo)
- Eduardo Fernandez-Moral (@EduFdez)
- Francisco Ángel Moreno-Dueñas (@famoreno)
-
Brief description: Robots are quickly becoming part of the Internet of Things. Naturally, a web-based UI is ideal for an Internet connected robot. You will be providing a web-based UI for MRPT. The backend RESTful web service must be able to interact with a native MRPT application and the frontend must be able to run in a Chrome browser. You will use a MVC design pattern, so that new web applications can be easily developed and maintained. A native C++ WebSocket library such as libwebsockets should be used to efficiently stream real-time data from the MRPT app to the browser.
-
Expected results: At least two applications. The applications may be web-based clones similar to a current wxwidget applications. At least one application must be able to render robot poses, observations and maps in 3D using real-time data.
-
Knowledge prerequisites: C++, WebSockets, REST, MVC, JavaScript(e.g. AngularJS, socket.io), WebGL
-
Difficulty level: Middle

-
Brief description:
nanoflannis a children project from MRPT, born as a smaller and faster version of the widely-used (OpenCV, PCL) FLANN C++ library for kd-tree neighbor search.nanoflannis especially efficient for finding nearest neighbors in 2D/3D point clouds, an operation at the heart of most ICP algorithms for robot SLAM and localization. A key feature missing fromnanoflannis the ability to support dynamic point clouds: at present, adding just 1 point to a pointcloud of 1e6 points would force rebuilding the kd-tree index, a costly operation. The goal of this project would be, among other minor improvements, the introduction of two dynamic strategies: (a) rebuild threshold, and (b) the logarithm method. In theory, (b) is better, but both should be implemented and benchmarked, among them, and other kd-tree C++ libraries, so we could be an informed decision about which is the most efficient implementation we should use in MRPT and other robotics software. In the way,nanoflanncould be renamed something else, likelibkdtor anything even more creative! -
Expected results: An improved version of
nanoflann, capable of handling dynamic datasets efficiently. MRPT ICP, perhaps after modifications, should build against the new kd-tree code. The results of the above mentioned benchmark, along with run-time improvements of ICP runs over public datasets of 3D point clouds. - Knowledge prerequisites: C++, algorithms complexity analysis.
- Difficulty level: Middle.
-
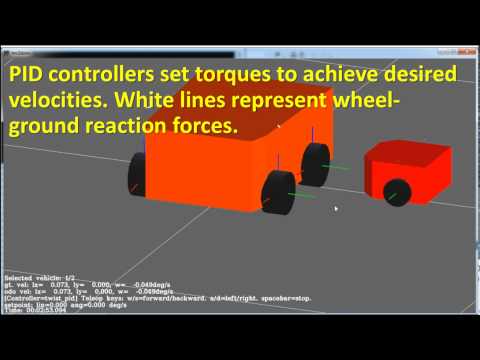
Brief description: mvsim is a children project of MRPT that allows real-time dynamic simulation of multiple vehicles. MultiVehicle simulator (mvsim) is a lightweight, realistic dynamical simulator for 2D ("2.5D") vehicles and robots. It is tailored to analysis of vehicle dynamics, wheel-ground contact forces and accurate simulation of typical robot sensors (e.g. laser scanners). It includes a C++ library
mvsim, a standalone app and a ROS node. -
Expected results:
- Improve the existing prototype vehicle models to have more realistic kinematics and dynamics. A central point is fully understanding the forces involved in the vehicle propulsion, tire-ground interaction, etc.
- Maintenance of documentation explaining the Mechanical/Physics models, the existing (and newly created) APIs, etc.
- Integration with MATLAB (via MEX and Matlab classes).
- Simple C++ and/or MATLAB examples demonstrating different interesting behavior: vehicle slippage, slipping angle while maneuvering, a vehicle pushing a heavy block, etc. (Many of these are already there, but should be sorted, documented, etc.)
- (Optional) Create new vehicle models, e.g. a tractor.
-
Knowledge prerequisites: C++, Dynamics/Mechanics.
-
Difficulty level: Middle.
-
Brief description:
- During 2005-2008 there existed a complex GUI application with this purpose called
SimpleMapsViewer, but it was Windows-only (written in Borland C++ Builder!) so it was dropped when MRPT became crossplatform. - It is strongly recommended to have a look at a working snapshot of the old app (from 2008!) to get an idea of the expected basic functionality: SimpleMapsViewer-MRPT-0.5.3-win32.zip Use: Extract the ZIP, execute
SimpleMapsViewer.exeand load the example map filelocalization_demo.simplemap. - At present, the only similar app in MRPT is observations2map, which allows generating metric map but without a GUI and without edit possibilities.
- During 2005-2008 there existed a complex GUI application with this purpose called
-
Expected results: A new GUI app should be able to load recent versions of MRPT simple maps as generated from ICP-SLAM or RBPF-SLAM. The app must allow inspecting the raw observations (at least, 2D LIDAR scans and monocular and stereo images) and generate one or more metric maps according to user-given parameters, e.g. 2D point clouds, 2D occupancy grid maps, a 3D octomap, etc.
-
Knowledge prerequisites: C++, GUI design (Qt or wxWidgets).
-
Difficulty level: Middle
-
Brief description: Design a set of "QR code-like" bidimensional markers suitable for recognition from several meters away, write (or integrate existing? AprilTags?) C++ code to detect and unequivocally identify them by some unique ID numbers in stereo images. A set of non-aligned points (a bidi array of corners?) must be detected with (sub)pixel accuracy to enable the optimization algorithm to converge to a non-degenerate solution. With all these, you can write code for automatically reconstruct the 3D pose (SE3) of all markers and the exact trajectory of the camera. This is called Bundle Adjustment or SLAM, and consists in solving an optimization problem, most of its pieces already implemented in MRPT. Also, once a map of markers is generated, one can run the optimization for the camera poses only, allowing accurate and robust localization, with applications to autonomous vehicle navigation, augmented reality, etc.
-
Expected results:
-
A new C++ class in
mrpt-detectorsfor QR-like markers detection. When finished, its integration into OpenCV will be considered. -
Generic new C++ classes in
mrpt-slamfor SLAM and localization with visual markers. -
A working application capable of running the new methods on live or offline stereo visual datasets.
-
The method must work for professional stereo cameras (e.g. Bumblebee2). The organization will provide the student with stereo images of the markers designed by him/her.
-
The method may optionally also work with a pair of consumer-grade webcams, in the case the student wants to print his/her own markers for testing at home.
-
Knowledge prerequisites: C++, computer vision, OpenCV, numerical optimization.
-
Difficulty level: Middle

(A proposal must comprise two "mini" projects to be eligible)
-
Brief description: Many datasets are available in MRPT Rawlog format or can be imported to it (e.g. Carmen logs). ROS log format (rosbag) is incompatible, so run-time or off-line conversion tools are required if Rawlog datasets want to be used in a ROS application.
- mrpt_rawlog ROS wiki page of existing packages. Very limited set of sensors are implemented at present.
-
Expected results: Being able to view all/most sensory data from a complex Rawlog dataset, e.g. Málaga Urban Dataset, in ROS RViz. It may be done via run-time on-the-fly conversion (easier) or by a new command-line tool capable of converting among
rawlogandrosbagformats (harder). - Knowledge prerequisites: C++, GNU/Linux.
- Difficulty level: Low / Middle-Low.
-
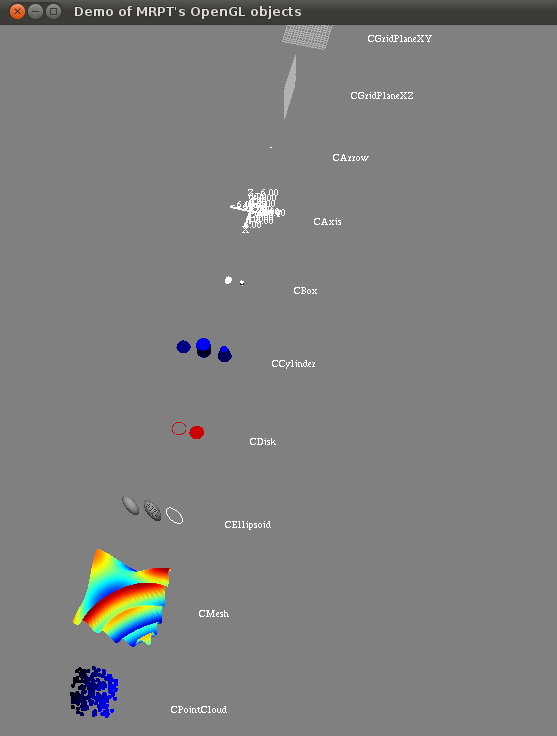
Brief description: MRPT offers C++ classes under
mrpt::guifor easily prototyping command-line apps capable of 2D and 3D rendering, without having to worry about message loops, multithreading, etc. All this runs behind scenes. At present, MRPT classes built upon wxWidgets GUI components. However, there exist other nice Qt alternatives, especially for 2D plots, so porting the code to Qt would be a great improvement.- See also: https://github.com/MRPT/mrpt/issues/107
-
Expected results:
mrpt::guishould build with wxWidgets or Qt, and the user API should be unaffected by the underlying GUI library. All existing examples and apps should compile with the new Qt GUI and run without problems. - Knowledge prerequisites: C++, Qt.
- Difficulty level: Easy
(A proposal must comprise two "mini" projects to be eligible)
-
Brief description: Propose a plan to port http://www.mrpt.org/ from WordPress to an appropriate modern static-page generator (e.g. Pelican). This includes writing small plugins (Python?) or templates to handle special pages with a particular, normalized form (e.g. datasets).
-
Expected results:
- Replicate all content in http://www.mrpt.org/ from a static HTML generator.
-
Knowledge prerequisites: Python, HTML5, CSS.
-
Difficulty level: Middle-Low.
- Brief description:
- Expected results:
- Knowledge prerequisites:
- Difficulty level: