Small vibration is found when the robot switch from the static status to motion #40
Description
Hi,
I just found some small vibrations when the robot switches from the static status to motion as new command is received.
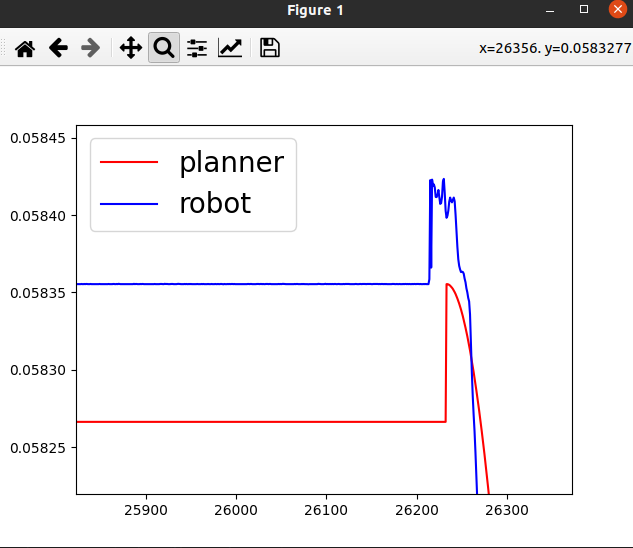
I plot all the waypoints computed from the Kuka_plan_runner and the real_real pose data (shown in the attached image).
It seems to that it is due to the piecewise polynomial method changes the starting point in order to get zero gradient (red line in the figure). As a result, the robot's motor would vibration a bit at very beginning when the motion command is received.
Anyone has seen this before? Should I modify the polynomial method?