☰: Omnicopter
An Omnicopter is a copter that can provide thrust in all directions (6 degrees of freedom). This allows it to move in any direction without having to tilt, and it can hover at an arbitrary tilt angle.
See Omnicopter types
Some actual variations of omnicopters (full and partial) you can see in that videos: https://www.youtube.com/watch?v=QzHtWbtQiyg https://www.youtube.com/watch?v=HV8byYHDS8k
Video of a game, where you control full-symmetric 6 degrees of freedom vehicle with first person view: https://www.youtube.com/watch?v=f81U-EXSS3g Free version of this game is available: https://store.steampowered.com/app/450220/Overload_Playable_Teaser_30/
List of games with 6 degrees of freedom: https://en.wikipedia.org/wiki/Category:Video_games_with_6_degrees_of_freedom
Regular copter can do:
- Move without tilting: 1 axis (up-down)
- Change orientation without move: 1 axis (vertical axis (yaw))
Full omnicopter can do:
- Move without tilting: 3 axis (up-down, forward-backward, left-right)
- Change orientation without move: 3 axis (yaw, pitch, roll)
All copters, who has more degree of freedom than regular copter, and lesser, then in full omnicopter, are partial omnicopters.
For example, all compound helicopters can move in 2 axis (up-down, forward) without tilting, so they can be classified as a partial horizontal omnicopters.
A full omnicopter provides thrust in all directions and independent unrestricted tilt at any angle (6 degrees of freedom).
A partial omnicopter has limited degrees of freedom. For example: only 1 additional rotation axis in addition to a normal copter; or limited degrees of rotation in all or some axes.
A special case of a partial omnicopter is a stable horizontal copter with no tilt during acceleration/deceleration or in windy conditions. Of course, full omnicopters can do this too.
Ordered by orientation and movement.
Values in parentheses a theoretically accessible values, but not practically tested.
| Reference | DoF | Omnicopter type | Static orientation axis | Movement w/o tilting axis | Propulsion units | Actuators | Status |
|---|---|---|---|---|---|---|---|
| Regular copter | 2 | None | 1 | 1 | 2+ | 0+ | - |
| Common Compound helicopter | 3- | None | 1 | 2- | 3+ | 5+ | - |
| Partial omnicopter | 2+ | Partial | 1+ | 1+ | 2+ | 0+ | - |
| EAMS Lab Omnicopter | 4 | Horizontal | 1 | 3 | 6 | 0 | Cancelled |
| UCVision's Prototype 1 | 4 | Horizontal | 1 | 3 | 8 | 0 | Testing |
| Astria | 4 | Horizontal | 1 | 3 | 7 | 2 | In service |
| Cyclotech Technology Demonstrator | 3(4) | Horizontal (+Partial) | 1(2) | 2 | 4 | 8 | Dismissed |
| Cyclotech BlackBird Demonstrator | 4(5) | Horizontal (+Partial) | 1(2) | 3 | 6 | 12 | Testing |
| Voliro-T | 4- | Partial | 2- | 2 | 3 | 2 | In service |
| OmniQuad | 4+ | Partial | 1+ | 3 | 4 | 4 | Testing |
| Full omnicopter | 6 | Full | 3 | 3 | 2+ | 0+ | - |
| AXS-µ1 | 6 | Full | 3 | 3 | 8 (4 nodes with double rotors) | 8 | Pre-production |
| ETH Omnicopter | 6 | Full | 3 | 3 | 8 | 0 | Open-source |
| ETH Avero Omnicopter | 6 | Full | 3 | 3 | 3 | 3 | Testing |
| HAGAMOSphere | 6 | Full | 3 | 3 | 8 | 0 | Testing |
| Lynchpin Omnicopter | 6 | Full | 3 | 3 | 6 | 0 | Cancelled |
| MOD - depends on configuration | 2-6 | None-Full | 1-3 | 1-3 | 2-9 | 0-6 | Prototyping |
Type: Horizontal omnicopter
Status: Designing
- Move: 3 axis
- Rotation: 1(2) axis
Main article: Cyclotech BlackBird Demonstrator
Type: Horizontal omnicopter
Status: Testing
- Move: 3 axis
- Rotation: 1(2) axis
Main article: Cyclotech BlackBird Demonstrator
Type: Horizontal omnicopter
Project highlights using of cyclorotor as auxiliary positioning device for precise maneuverability.
Status: In service
-
Move: 3 axis
-
Rotation: 1 axis
-
SUAV:Top: Largest horizontal omnicopter in service
-
SUAV:Top: Horizontal omnicopter in service
-
SUAV:Top ever: First horizontal omnicopter in service
Site: https://www.pitchaero.com/astria-drone

Company: Pitch Aeronautics
Operation types:
- Installation of sensors on power lines https://www.pitchaero.com/wirewarrior-line-sensor
- Installation of bird diverters on power lines https://www.pitchaero.com/featherfender-bird-diverter
Type: Full omnicopter
Project highlights full omnicopter with 2-axis of rotation thrust-vectoring nodes.
Status: Pre-production
- Move: 3 axis
- Rotation: 3 axis
Site: https://www.aerix-systems.com/en-us/solutions/plateforme
- SUAV:Top: First strong winds resistant full omnicopter
- SUAV:Top: First full omnicopter in pre-production

Company: Aerix Systems
Specifications:
- Maximum speed: 200 km/h
- Dimensions: 40cm x 40cm
- Turning radius 0km/h - 200km/h: 1m
- Wind resistance: 100 km/h (all-weather missions)
- To 0km/h from 200km/h in: 2,5s
- Durability: 20km
- Vivacity: Obstacle avoidance and terrain following at high and low speeds.
Type: Partial omnicopter
Project highlights tiltrotor bicopter with additional orientation thruster.
Status: In service
- Move: 2 axis
- Rotation: 2- axis
Note: Possibility to rotate around pitch axis at almost 360 degrees, but continuous rotation is not allowed.
Site: https://voliro.com/voliro-solution/
- SUAV:Top: Largest partial omnicopter in service
- SUAV:Top: Partial omnicopter in service
- SUAV:Top ever: First partial omnicopter in service

Company: Voliro
Main operation type: https://voliro.com/blog/dry-film-thickness-measurement/
Specifications:
- Weight (batteries excluded): 3.7kg
- Max. takeoff weight: 6kg
- Max. payload weight: 1kg
- Dimensions (fully assembled): (L×W×H) 118×109×34cm
- Dimensions (w/o rotors, bumpers, payload): 78×78×34cm
- Foldable: The drone can be transported through a 50 cm (20 in) manhole by detaching the tail, payload, and bumpers.
- Sensors: Sensing System Depth camera (VGA), 6×LiDAR distance sensor, 6× vision-based velocity sensor
- Flight time: 10 - 14minutes (mission and payload dependent)
- Flight modes: Manual (attitude is fully stabilized), Altitude, Position, Interaction assistant
- Interaction accuracy: ±2cm (normal environment conditions, trained pilot)
- Max. horizontal speed 3m/s (in Position flight mode), 15 m/s (in Altitude and Manual flight mode)
- Max. ascent / descent speed 3 m/s (in Position flight mode), 10+ m/s (in Manual mode)
- Pitch angle: ±90° (can be oriented to a surface of any orientation)
- Assembly time: < 5 min
- Wind resistance: 12m/s (in free flight), 8m/s (in Interaction flight mode) Recommendation for precise interaction: Max. 6 m/s
- Temperature -10 - 40°C No continuous direct sunlight if temperature is above 30 °C / 86 °F I If the temperature is below 5 °C / 41 °F flight time can be reduced
- Precipitation: Dry-weather operation only: No rain, no snowfall
- Service ceiling 5000m ASL
- Battery Energy 99 Wh (a pair of batteries required)
- Battery Capacity 2 × 4500 mAh
- Battery Weight 1.3 kg / 2.87 lbs (per battery pair)
- Charging temperature 10 - 30 °C
- Charging time < 90 min
- Drone case: 80×55×35cm 20kg Content: Drone, RC, inspector tablet, RTK base
- Payload case: 60×35×20cm 8-12 kg (depending on content) Content: Payload, up to 6 batteries
- Charger and accessories case: 60×35×20 cm 8 kg Contains: charger, spare parts, accessories
Type: Horizontal omnicopter
Status: Testing
Project highlights horizontal omnicopter with main thrust rotors and small orientation rotors.
Note: At the first view, design of orientation rotors related to EAMS Lab Omnicopter, but more basically it related to doubled design of Triangular Quadrotor: A More Efficient Quadrotor Configuration.
- Move: 3 axis
- Rotation: 1 axis
Site: https://ucvision.org.nz/drones/

Research centre: University of Canterbury
Type: Partial omnicopter
Also: Haptic-OmniQuad
Status: Tethered flight tests.
Project highlights partial omnicopter with relative to standard quadcopter design.
- Move: 3 axis
- Rotation: 1+ axis
Site: https://tilties2.github.io/omniquad-website/, https://github.com/tilties2/PX4-OmniQuad

Video: https://www.youtube.com/watch?v=nwnB2agqT-0
Design and Control of an Omnidirectional Aerial Robot with a Miniaturized Haptic Joystick for Physical Interaction
Fully actuated aerial robot proved their superiority for Aerial Physical Interaction (APhI) over the past years. This work proposes a minimal setup for aerial telemanipulation, enhancing accessibility of these technologies. The design and the control of a 6-DoF joystick with 4-DoF haptic feedback is detailed. It is the first haptic device with standard Remote Controller (RC) form factor for APhI. By miniaturizing haptic device, it enhances RC with the sense of touch, increasing physical awareness. The goal is to give operators an extra sense, other than vision and sound, to help to perform safe APhI. To the best of the authors knowledge, this is the first teleoperation system able to decouple each single axis input command. On the omnidirectional quadrotor, by reducing the number of components with a new design, we aim a simplified maintenance, and improved force and thrust to weight ratio. Open-sourced physic based simulation and successful preliminary flight tests highlighted the tool as promising for future APhI applications.
https://arxiv.org/pdf/2410.09003, https://arxiv.org/abs/2410.09003
Julien Mellet, Andrea Berra, Salvatore Marcellini, Miguel Ángel Trujillo Soto, Guillermo Heredia, Fabio Ruggiero, Vincenzo Lippiello
- A. Ollero, M. Tognon, A. Suarez, D. Lee, and A. Franchi, “Past, present, and future of aerial robotic manipulators,” IEEE Transactions on Robotics, vol. 38, no. 1, pp. 626–645, 2022.
- M. Selvaggio, M. Cognetti, S. Nikolaidis, S. Ivaldi, and B. Siciliano, “Autonomy in physical human-robot interaction: A brief survey,” IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7989–7996, 2021. Fig. 6: Plot of the robot navigation mission in the plane (OW , xW , zW ) with a physical interaction shaded in grey. During the contact, we plot the rotor angle α1.
- K. Bodie, M. Brunner, M. Pantic, S. Walser, P. Pfändler, U. Angst, R. Siegwart, and J. Nieto, “Active interaction force control for contact-based inspection with a fully actuated aerial vehicle,” IEEE Transactions on Robotics, vol. 37, no. 3, pp. 709–722, 2020.
- B. Xu, F. Gao, C. Yu, R. Zhang, Y. Wu, and Y. Wang, “Omnidrones: An efficient and flexible platform for reinforcement learning in drone control,” IEEE Robotics and Automation Letters, vol. 9, no. 3, pp. 2838–2844, 2024.
- A. Y. Mersha, S. Stramigioli, and R. Carloni, “On bilateral teleoperation of aerial robots,” IEEE Transactions on Robotics, vol. 30, no. 1, pp. 258–274, 2014.
- M. Allenspach, N. Lawrance, M. Tognon, and R. Siegwart, “Towards 6dof bilateral teleoperation of an omnidirectional aerial vehicle for aerial physical interaction,” in 2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 9302–9308.
- M. Young, C. Miller, Y. Bi, W. Chen, and B. D. Argall, “Formalized task characterization for human-robot autonomy allocation,” in 2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 6044–6050.
- S. Mintchev, M. Salerno, A. Cherpillod, S. Scaduto, and J. Paik, “A portable three-degrees-of-freedom force feedback origami robot for human–robot interactions,” Nature Machine Intelligence, vol. 1, no. 12, pp. 584–593, 2019.
- M. Brunner, G. Rizzi, M. Studiger, R. Siegwart, and M. Tognon, “A planning-and-control framework for aerial manipulation of articulated objects,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 689–10 696, 2022.
- M. Kamel, S. Verling, O. Elkhatib, C. Sprecher, P. Wulkop, Z. Taylor, R. Siegwart, and I. Gilitschenski, “Voliro: An omnidirectional hexacopter with tiltable rotors,” arXiv, 2018.
- T. Hui, E. Cuniato, M. Pantic, M. Tognon, M. Fumagalli, and R. Siegwart, “Passive aligning physical interaction of fully-actuated aerial vehicles for pushing tasks,” 2024. [Online]. Available: https://arxiv.org/abs/2402.17434
- F. Buonamici, M. Carfagni, R. Furferi, Y. Volpe, L. Governi et al., “Generative design: an explorative study,” Computer-Aided Design and Applications, vol. 18, no. 1, pp. 144–155, 2020.
- Z. Wang, Y. Zhang, and A. Bernard, “A constructive solid geometry-based generative design method for additive manufacturing,” Additive Manufacturing, vol. 41, p. 101952, 2021. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S2214860421001172
- M. Allenspach, K. Bodie, M. Brunner, L. Rinsoz, Z. Taylor, M. Kamel, R. Siegwart, and J. Nieto, “Design and optimal control of a tiltrotor micro-aerial vehicle for efficient omnidirectional flight,” The International Journal of Robotics Research, vol. 39, no. 10-11, pp. 1305–1325, 2020.
- F. Conti and O. Khatib, “Spanning large workspaces using small haptic devices,” in First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems. World Haptics Conference, 2005, pp. 183–188.
- S. Madgwick et al., “An efficient orientation filter for inertial and inertial/magnetic sensor arrays,” Report x-io and University of Bristol (UK), vol. 25, pp. 113–118, 2010.
- S. Marcellini, J. Cacace, and V. Lippiello, “A px4 integrated framework for modeling and controlling multicopters with til table rotors,” in 2023 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2023, pp. 1089–1096.
- R. Smith, “Open Dynamics Engine,” 2008, http://www.ode.org/
Type: Full omnicopter
Status: Open-source
Author: Dario Brescianini
Project highlights use of 8 fixed pitch propellers mounted on a cubic frame.
- Move: 3 axis
- Rotation: 3 axis
Site: https://docs.px4.io/main/en/frames_multicopter/omnicopter.html
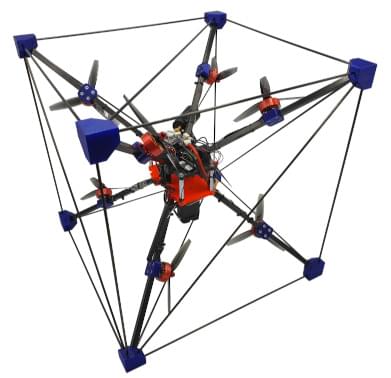
Research centre: ETH Zurich
SUAV:Top ever: First ever flying omnicopter. SUAV:Top ever: First ever omnicopter in open-source.
Videos:
Type: Partial omnicopter
Omnidirectional Aerial Manipulation Platform for Contact-Based Inspection
Project highlights use of 6 thrust-vectored ducted funs.
Predecessor of Voliro-T
- Move: 3- axis
- Rotation: 3- axis
Video: https://www.youtube.com/watch?v=-RCQmaKvsL0
Research centre: ETH Zurich
Type: Full omnicopter
Status: Prototyping
Project highlights use of fixed impellers with thrust-vector control by moving the exhaust pipes.
- Move: 3 axis
- Rotation: 3 axis
Site: https://avero.ethz.ch/

Research centre: ETH Zurich
Video: https://www.youtube.com/watch?v=9URnHWqpSHI
Linkedin: https://www.linkedin.com/company/averodrone/
Instagram: https://www.instagram.com/avero_drone/
Type: Full omnicopter
Project highlights a coaxial omnicopter with 8 fixed-pitch rotors.
Status: Prototyping
- Move: 3 axis
- Rotation: 3 axis
Site: https://hagamosphere.com/

Company: DIC
Video: https://www.youtube.com/watch?v=gqsHMn_8EQM (2024-12-19)
Type: Horizontal omnicopter
Status: Cancelled
- Move: 3 axis
- Rotation: 1 axis
SUAV:Top ever: The first ever horizontal omnicopter.

Video: https://www.youtube.com/watch?v=UR1KxYMujtQ (2018-07-25)
Type: Full omnicopter
Project highlights the possibility of a modular omnicopter.
Status: Inactive.
- Move: 3 axis
- Rotation: 3 axis
Site: https://www.terryslynchpins.com/

Videos:
-
The Lynchpin—A Novel Geometry for Modular, Tangential, Omnidirectional Flight
Terrence Dashon Howard, Christian Molter, Chris Dale Seely, Jeff Yee
Keywords: 6DOF, Drone, Swarm, Drone, midair docking, UAV, Flying structures, Lynchpin, Tangential flight, omnidirectional flight, modular drones
https://www.terryslynchpins.com/s/FINAL-PAPER-PUBLISHED.pdf https://static1.squarespace.com/static/5f3c292b69b32e2a8fc88ce7/t/66451a207b42610041ccd9f8/1715804708252/FINAL+PAPER+PUBLISHED.pdf
- Hofmann L.G., Hoh, R.H., Jewell, W.F., Gary, L. et al., “Development of Automatic and Manual Flight Director Landing Systems for the XV-15 Tilt Rotor Aircraft in Helicopter Mode,” NASA Technical Report No. 1092-1, 1978.
- Molter, C. and Cheng, P.W., “ANDroMeDA—A Novel Flying Wind Measurement System,” Journal of Physics: Conference Series 1618, no. 3 (2020): 032049, doi:10.1088/1742-6596/1618/3/032049.
- Lawler, M., Ivler, C., Tischler, M., and Shtessel, Y., “System Identification of the Longitudinal/Heave Dynamics for a Tandem-Rotor Helicopter Including Higher-Order Dynamics,” Presented at in AIAA Atmospherics Flight Mechanics Conference and Exhibit, Keystone, CO, 2006, doi:10.2514/6.2006-6147.
- Brescianini, D., “Increasing the Maneuverability of Multirotor Vehicles: Attitude Control, an Omni-Directional Multirotor Vehicle, and Trajectory Generation,” PhD thesis, ETH Zürich, 2018, doi:10.3929/ethz-b-000337944.
- Ryll, M., “A Novel Overactuated Quadrotor UAV,” PhD thesis, University of Stuttgart, 2015, doi:10.18419/opus-4606.
- Kamel, M. et al., “The Voliro Omniorientational Hexacopter: An Agile and Maneuverable Tiltable-Rotor Aerial Vehicle,” IEEE Robotics & Automation Magazine 25, no. 4 (2018): 34-44, doi:10.1109/MRA.2018.2866758.
- Company Website, “VOLIRO AG,” accessed August 2022, https://voliro.com/.
- Edmondson, A.C., The Synergetic Geometry of R. Buckminster Fuller (Design Science Collection, Boston, 1987), ISBN:978-1-4684-7485-5.
- Leishman, J.G., Principles of Helicopter Aerodynamics (Cambridge, UK: Cambridge University Press, 2000), 43-44, ISBN:0-521-66060-2.
- GitHub Repository, “PX4—Autopilot,” accessed November 2021, https://github.com/PX4/PX4-Autopilot/blob/v1.11.3/src/modules/mc_hover_thrust_estimator/MulticopterHoverThrustEstimator.cpp.
- Meier, L., Honegger, D., and Pollefeys, M., “PX4: A Node-Based Multithreaded Open Source Robotics Framework for Deeply Embedded Platforms,” Presented at in IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, 2015, doi:10.1109/ICRA.2015.7140074.
- Koubâa, A., Allouch, A., Alajlan, M., Javed, Y. et al., “Micro Air Vehicle Link (MAVlink) in a Nutshell: A Survey,” IEEE Access 7 (2019): 87658-87680, doi:10.1109/ACCESS.2019.2924410.BUGS.
- Wang, D., Li, S., Xiao, G., Liu, Y. et al., “An Exploratory Study of Autopilot Software Bugs in Unmanned Aerial Vehicles,” Presented in Proceedings of the 29th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering (ESEC/FSE 2021), Athens, Greece, 2021, doi:10.1145/3468264.3468559.
- Molter, C. and Cheng, P.W., “Propeller Performance Calculation for Multirotor Aircraft at forward Flight Conditions and Validation with Wind Tunnel Measurements,” Presented at in International Micro Air Vehicle Conference and Flight Competition, Toulouse, France, 2017.
- Brescianini D., Hehn, M., and D’Andrea, R., “Nonlinear Quadrocopter Attitude Control,” Technical Report ETH Zürich, doi:10.3929/ethz-a-009970340.
- Oung, R., Bourgault, F., Donovan, M., and D’Andrea, R., “The Distributed Flight Array,” Presented at the in IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, 2010, doi:10.1109/ROBOT.2010.5509882.
- Gabrich, B., Saldaña, D., Kumar, V., and Yim, M., “A Flying Gripper Based on Cuboid Modular Robots,” Presented at in the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 2018, doi:https://doi.org/10.1109/ICRA.2018.8460682.
- YouTube Video, “Physical Simulation of Lynchpin Bonding,” accessed August 2022, https://youtu.be/ZO86yAibAv0.
Type: Up to Full omnicopter
My omnicopters family project.
Project highlights the wide applicability and multiple configurations of omnicopter systems.
- Move: 1-3 axis
- Rotation: 1-3 axis
Site: https://github.com/bpodchezertsev/MOD