


VINS-Multi is a robust optimization-based asynchronous multi-camera-IMU state estimator, which achieves accurate self-localization for autonomous applications (drones, cars, and AR/VR). VINS-Multi is an extension of VINS-Fusion, which supports multiple asynchronous visual-inertial sensor types (stereo camera modules + IMU, RGB-D camera modules + IMU).
Features:
- multiple asynchronous sensors support (stereo camera modules + IMU, RGB-D camera modules + IMU)
- online spatial calibration (transformation between cameras and IMU)
- online temporal calibration (time offset between cameras and IMU)
- handles partial camera modules failures
Authors: Luqi Wang, Yang Xu, and Shaojie Shen from the Aerial Robotics Group, HKUST
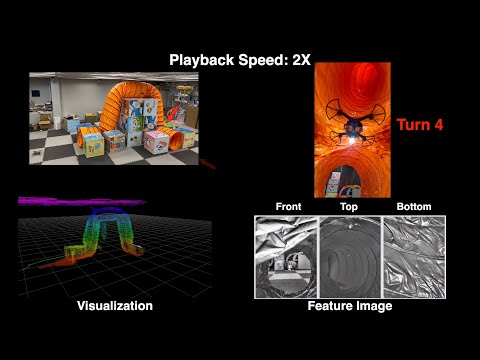
Videos:
Related Paper: (paper is not exactly same with code)
- VINS-Multi: A Robust Asynchronous Multi-camera-IMU State Estimator, Luqi Wang, Yang Xu, and Shaojie Shen, 3rd Workshop on Future of Construction: Lifelong Learning Robots in Changing Construction Sites, IEEE International Conference on Robotics and Automation (ICRA, 2024), Best research award pdf
*If you use VINS-Multi for your academic research, please cite our related paper:
@article{wang2024vins,
title={VINS-Multi: A Robust Asynchronous Multi-camera-IMU State Estimator},
author={Wang, Luqi and Xu, Yang and Shen, Shaojie},
journal={arXiv preprint arXiv:2405.14539},
year={2024}
}
Ubuntu 64-bit 20.04. ROS Noetic. ROS Installation
Follow Ceres Installation.
Clone the repository and catkin_make:
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Multi.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
(if you fail in this step, try to find another computer with clean system or reinstall Ubuntu and ROS)
Download realsense_raw_515_435.bag to YOUR_DATASET_FOLDER. Open four terminals, run vins odometry, rviz and play the bag file respectively. Green path is VIO odometry.
roslaunch vins_multi vins_rviz.launch
roslaunch vins_multi multi_l515_d435.launch
rosbag play YOUR_DATASET_FOLDER/realsense_raw_515_435.bag

VIO is not only a software algorithm, it heavily relies on hardware quality. For beginners, we recommend you to run VIO with professional equipment, like Intel Realsense camera modules.
Write a config file for your device. You can take config files of the previous example.
VINS-Multi follows VINS-Fusion and support several camera models (pinhole, mei, equidistant). You can follow the same calibration procedure in VINS-Fusion to calibrate the cameras. For example:
rosrun camera_models Calibrations -w 12 -h 8 -s 80 -i calibrationdata --camera-model pinhole
We use ceres solver for non-linear optimization and a generic camera model.
The source code is released under GPLv3 license.
We are still working on improving the code reliability. For any technical issues, please contact Luqi Wang <lwangaxATconnect.ust.hk> and Yang Xu <yxuewATconnect.ust.hk>.
For commercial inquiries, please contact Shaojie Shen <eeshaojieATust.hk>.