Ros2Go2Estimator 是四足/双足机器人在 ROS 2 Humble / Ubuntu 22.04 上的 估计算法仓库,主要负责
使用 IMU + 关节编码器 + 足底压力 ,给出高精度里程计结果
| 类别 | 说明 |
|---|---|
| 双足 / 四足通用 | 行进中自动识别支撑足,无需切模式;支持站立 / 行走快速切换 |
| 全 3D & 平面 2D | 同时发布完整 6DoF 里程计 (SMX/Odom) 与压平 Z‑轴的 2D 里程计 (SMX/Odom_2D) |
| 零依赖外部传感器 | 无视觉、激光传感器也能获得 <1 % 累积误差¹ |
| 运行时参数调节 | 三轴补偿角等参数可通过 ros2 param 在线微调 |
| 范畴 | 仓库 | 功能简介 |
|---|---|---|
| 底层驱动 | https://github.com/ShineMinxing/Ros2Go2Base | DDS 桥、Unitree SDK2 控制、点云→Scan、TF |
| 里程计 | Ros2Go2Estimator (本仓库) | 纯运动学多传感器融合,发布 SMX/Odom / SMX/Odom_2D |
| SLAM / 建图 | https://github.com/ShineMinxing/Ros2SLAM | 集成 Cartographer 3D、KISS-ICP、FAST-LIO2、Point-LIO 多 SLAM |
| 语音 / LLM | https://github.com/ShineMinxing/Ros2Chat | 离线 ASR + OpenAI Chat + 语音合成 |
| 图像处理 | https://github.com/ShineMinxing/Ros2ImageProcess | 相机、光点/人脸/无人机检测 |
| 吊舱跟随 | https://github.com/ShineMinxing/Ros2AmovG1 | Amov G1 吊舱控制、目标跟踪 |
| 工具集 | https://github.com/ShineMinxing/Ros2Tools | 蓝牙 IMU、手柄映射、吊舱闭环、数据采集 |
⚠️ 按需克隆:若只想提升状态估计,可 仅使用本仓库;如需联动建图,可搭配 Ros2SLAM 与 Ros2Go2Base 使用,其它仓库互不强依赖。
Ros2Go2Estimator/
├── fusion_estimator/ # 源码包(ROS2 节点)
│ ├── launch/ # 示例 launch 文件
│ ├── cfg/ # 机器人 URDF
│ └── src/fusion_estimator_node.cpp # ROS2相关接口
│ └── src/Go2FusionEstimator # 纯C++实现,可移植到ROS1
├── config.yaml # 全局参数(见下)
└── Readme.md # ← 你正在看
| 参数 | 默认值 | 说明 |
|---|---|---|
sub_imu_topic |
SMX/Go2IMU |
订阅 IMU |
sub_joint_topic |
SMX/Go2Joint |
订阅关节状态 |
sub_mode_topic |
SMX/SportCmd |
接收复位 / 模式切换指令(可选) |
pub_estimation_topic |
SMX/Estimation |
发布内部融合状态 (debug) |
pub_odom_topic |
SMX/Odom |
发布 6DoF 里程计 |
pub_odom2d_topic |
SMX/Odom_2D |
发布 2D 里程计 |
odom_frame |
odom |
TF world frame |
base_frame |
base_link |
机器人质心 Frame |
base_frame_2d |
base_link_2D |
压平后的 2D Frame |
urdf_file |
cfg/go2_description.urdf |
机器人描述文件,用于腿长 / 连杆参数 |
Modify_Par_[1‑3] |
0.0 |
运行时可调三轴补偿角(°) |
# 1. clone 到工作空间
cd ~/ros2_ws/LeggedRobot/src
git clone --recursive https://github.com/ShineMinxing/Ros2Go2Estimator.git
# 2. 编译
cd .. && colcon build --packages-select fusion_estimator
source install/setup.bash
# 3. 运行(示例)
ros2 run fusion_estimator fusion_estimator_node/fusion_estimator_node (rclcpp)
├─ 发布
│ • SMX/Odom nav_msgs/Odometry (frame: odom → base_link)
│ • SMX/Odom_2D nav_msgs/Odometry (frame: odom → base_link_2D)
│ • SMX/Estimation custom / debug
├─ 订阅
│ • SMX/Go2IMU sensor_msgs/Imu
│ • SMX/Go2Joint sensor_msgs/JointState
│ • SMX/SportCmd std_msgs/Float64MultiArray (复位/模式)
└─ 依赖 TF 发布由 message_handle 包完成
- 支撑足检测:根据足底力矩与接触逻辑动态识别支撑点。
- 前向运动学:利用 URDF 中的连杆长度 + 关节角计算足端相对位姿。
- 零速更新 (ZU):支撑足静止期对 IMU 积分误差进行校正。
- 基于四元数微分的姿态积分:避免欧拉角奇异。
- 卡尔曼 / QP 融合:组合 IMU、足底里程对质心位置进行批量最小二乘纠正。
- 2D 投影:将 roll/pitch 置零,提供 IMU‑free 的平面 Odom。
详细推导请见技术白皮书 👉 Notion 文档
| 主题 | 点击图片观看 |
|---|---|
| 纯里程计建图 (站立/四足切换) |  |
| 室内行走误差 0.5 %‑1 % | 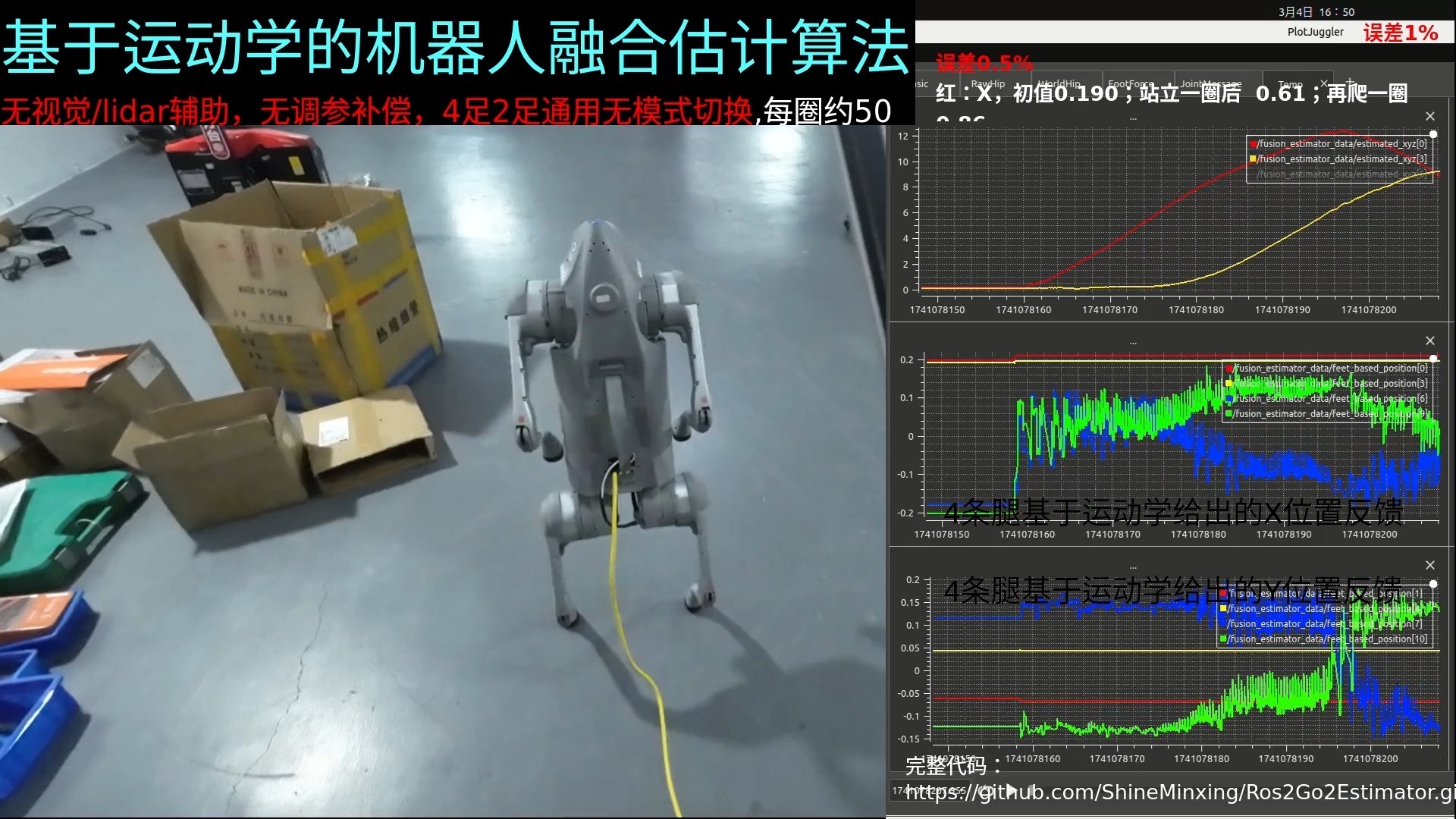 |
| 爬楼梯高度误差 < 5 cm | 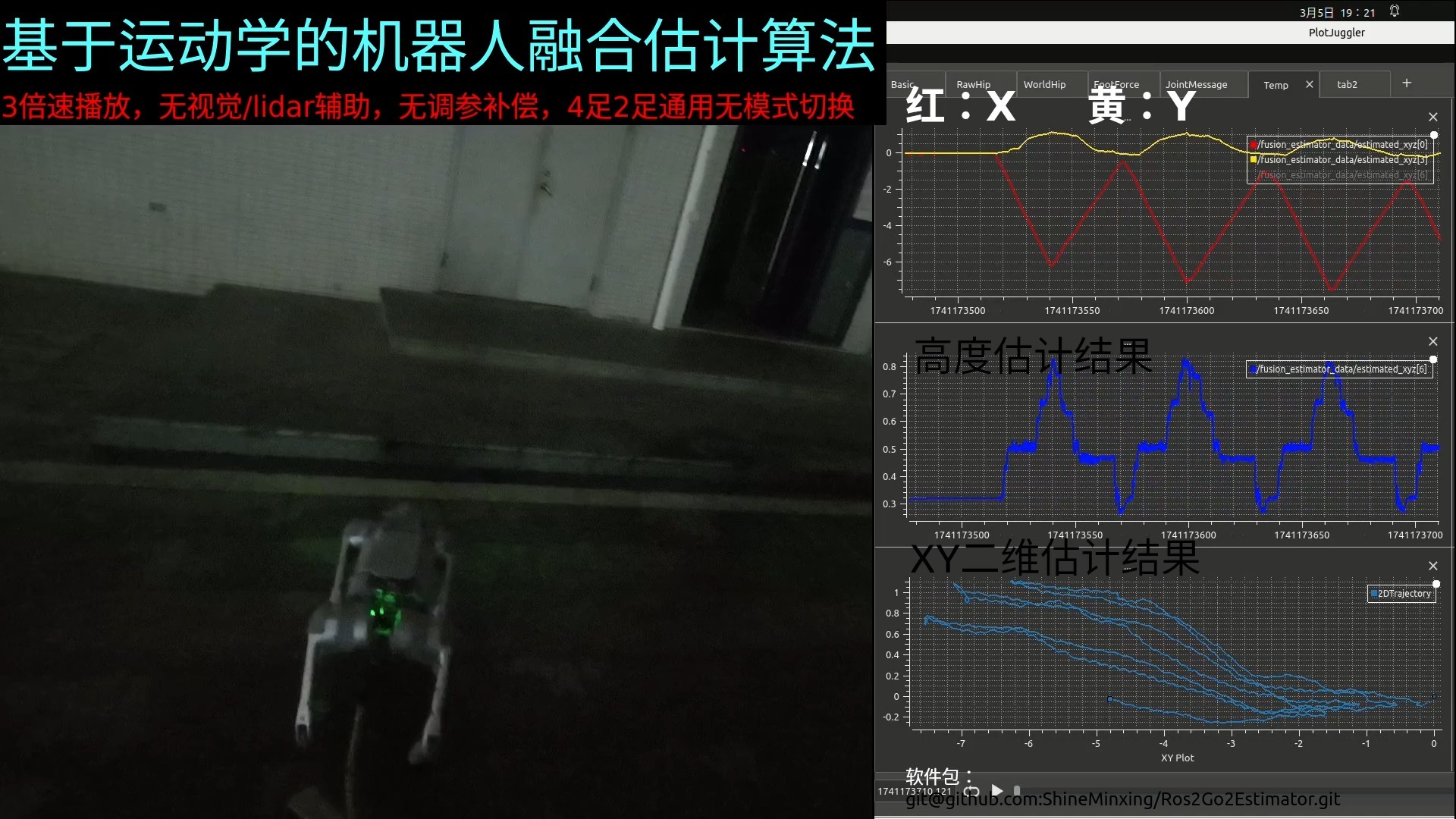 |
| 户外行走380m误差 3.3 % | 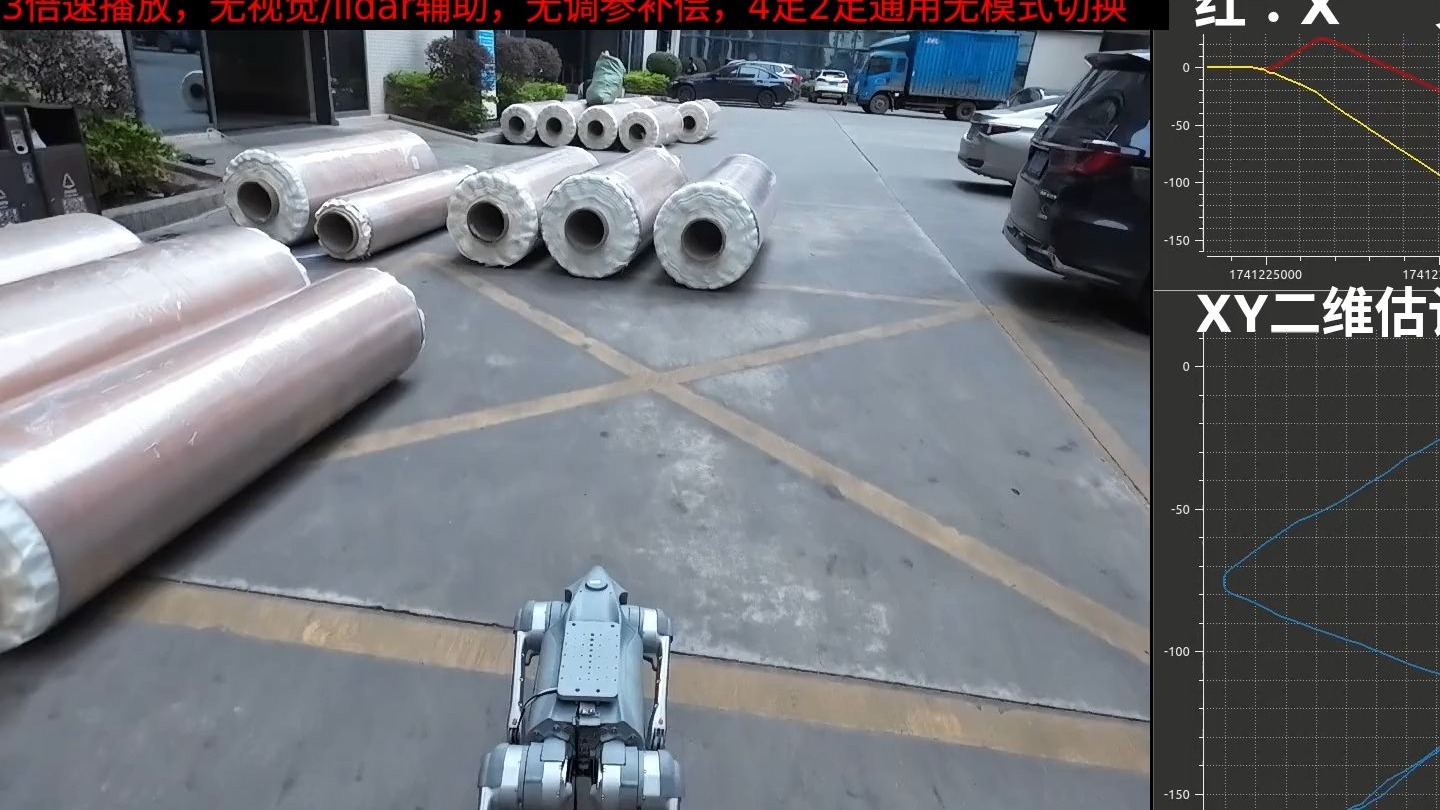 |
| 语音交互 + 地图导航 |  |
| 人脸识别跟踪 + 光点跟踪 | 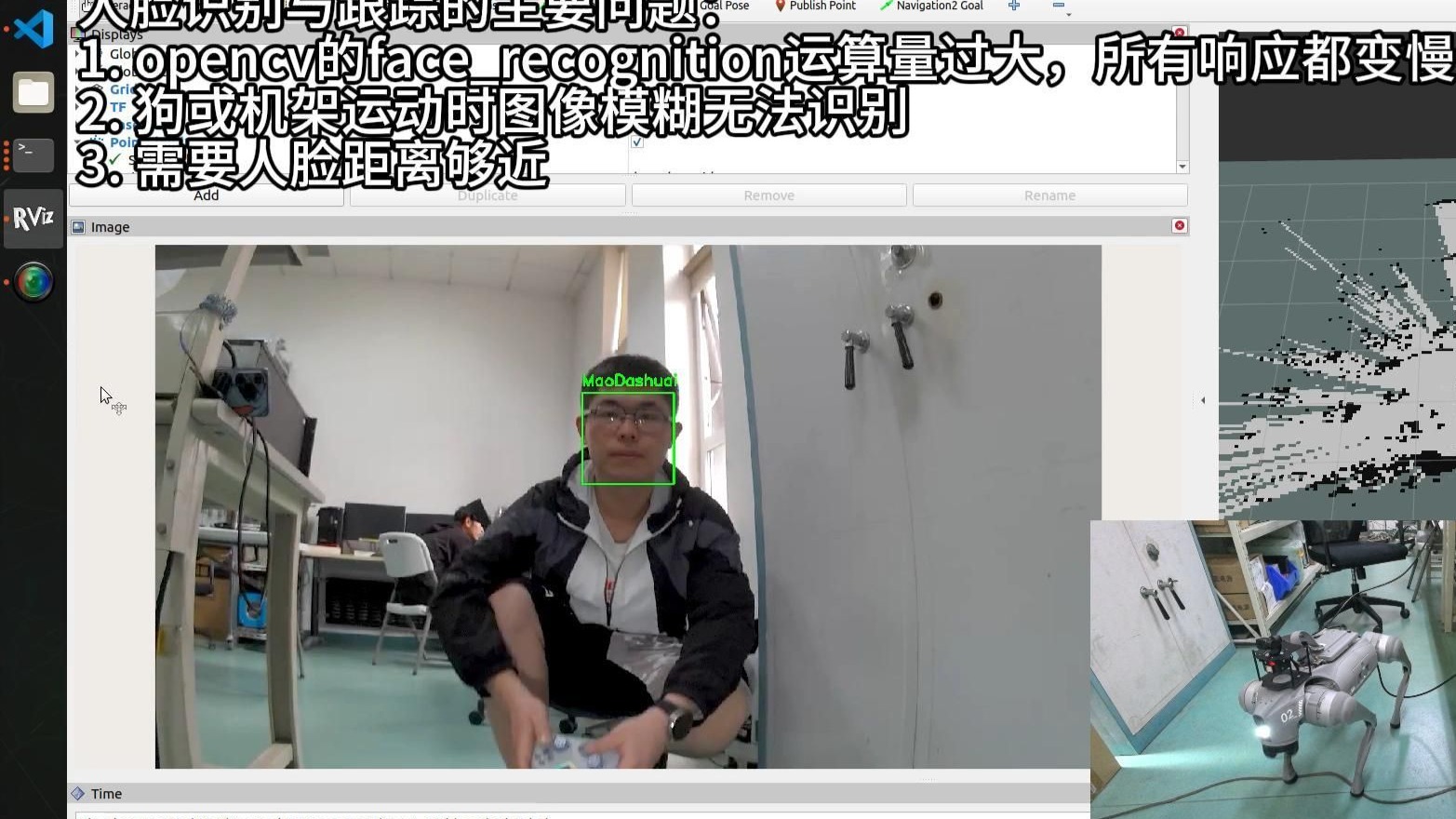 |
| AR眼镜头部运动跟随 | 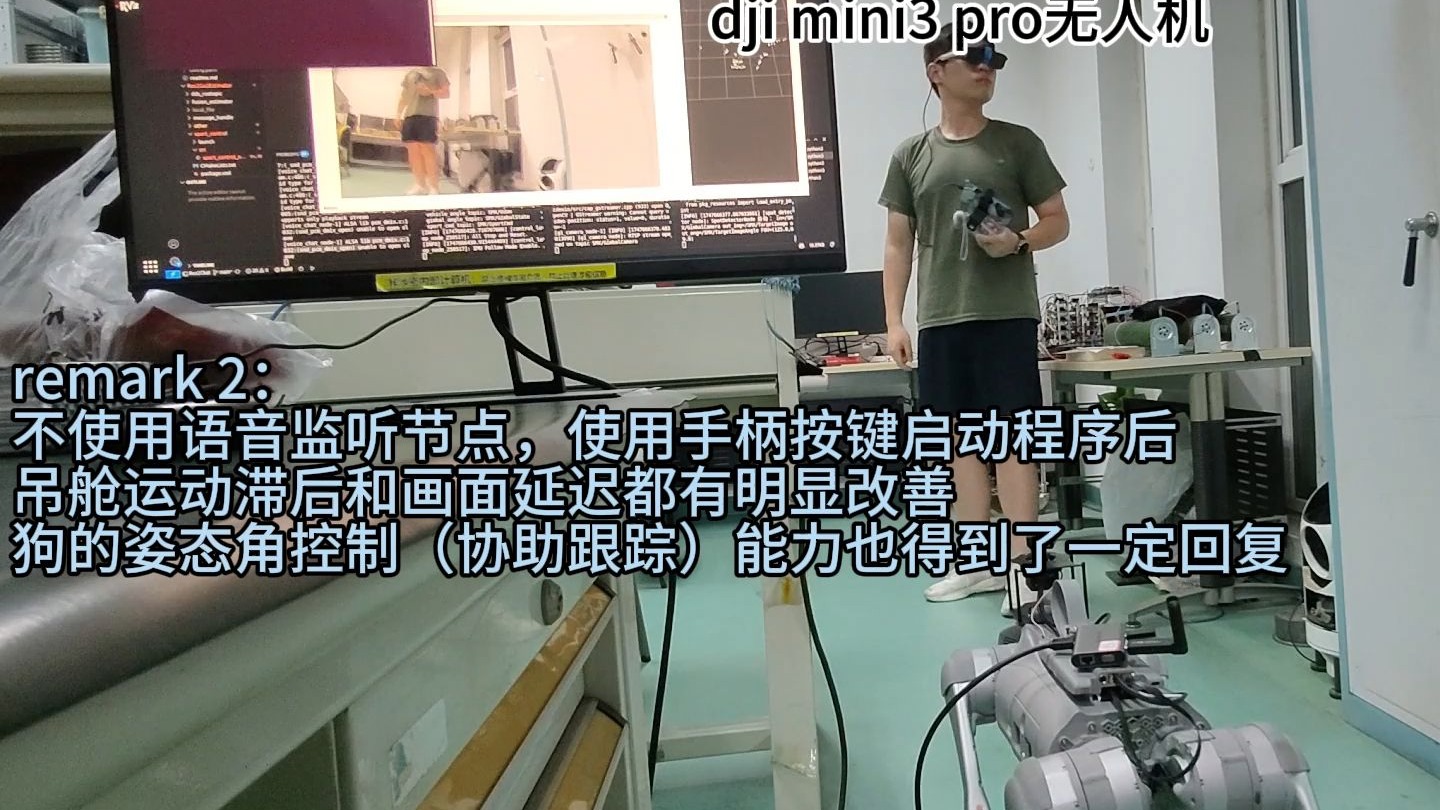 |
| YOLO无人机识别与跟随 |  |
| 机器狗光电吊舱与固定相机协同 |  |
| 多种SLAM方法集成 | 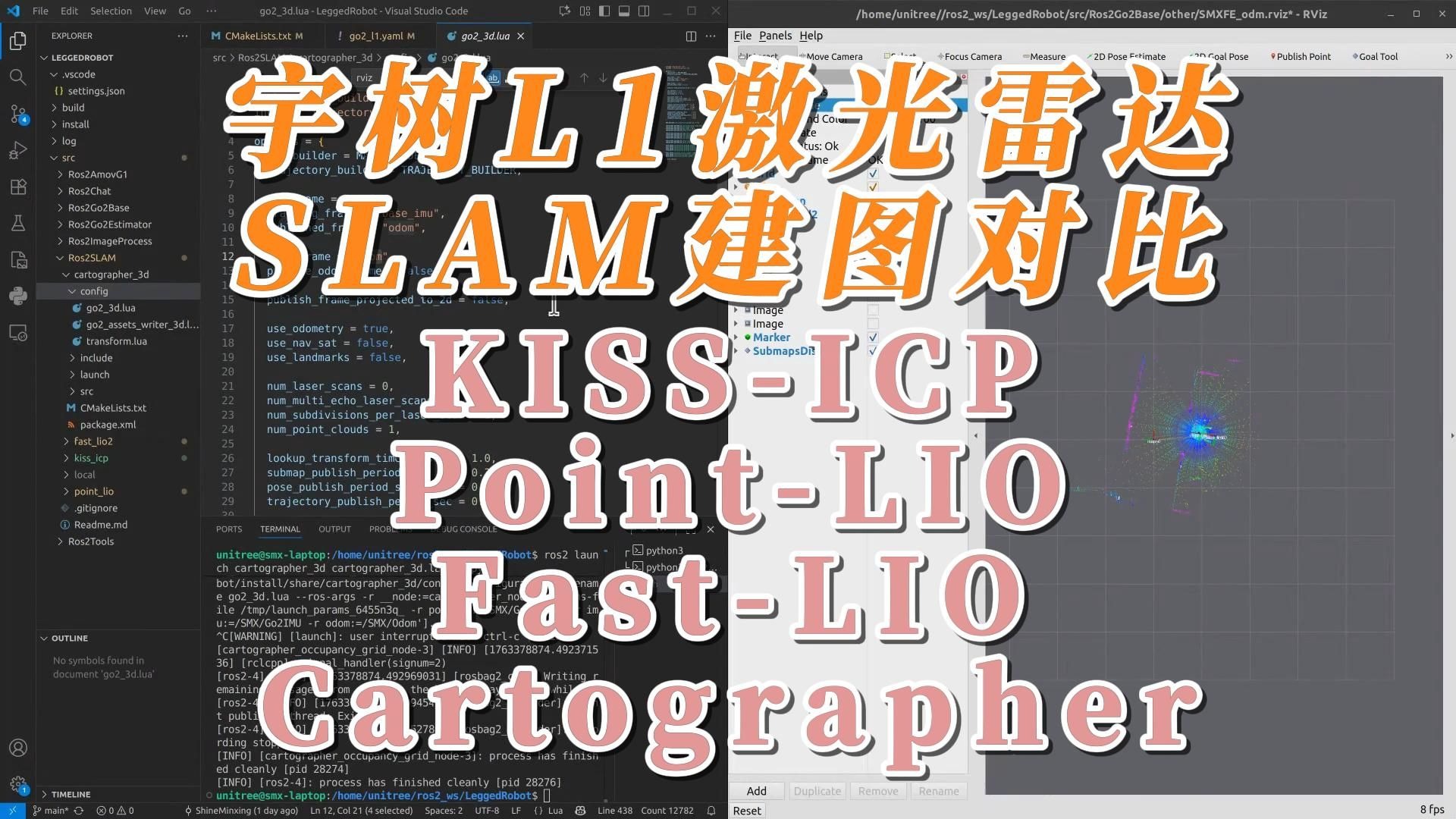 |
- 技术原理笔记:https://www.notion.so/Ros2Go2-1e3a3ea29e778044a4c9c35df4c27b22
- ROS1 版本参考:https://github.com/ShineMinxing/FusionEstimation
| 邮箱 | 单位 |
|---|---|
| [email protected] | 中国科学院光电技术研究所 |
📌 本仓库仍在持续开发中 — 欢迎 Issue / PR 交流、贡献!