This is the updated version of OAK-FFC-4P ROS1 wrapper. This driver is designed for OmniNxt
git clone https://github.com/D2SLAM-Fusion/oak_ffc_4p_ros.gitCompile Docker images
cd ./oak_ffc_4p_ros/docker
makeCreate Docker container and build the ROS wrapper in container
cd ./oak_ffc_4p_ros
./start_docker.sh 1
### Build ROS wrapper
catkin build**Start ROS wrapper Node **
source ./devel/setup.bash
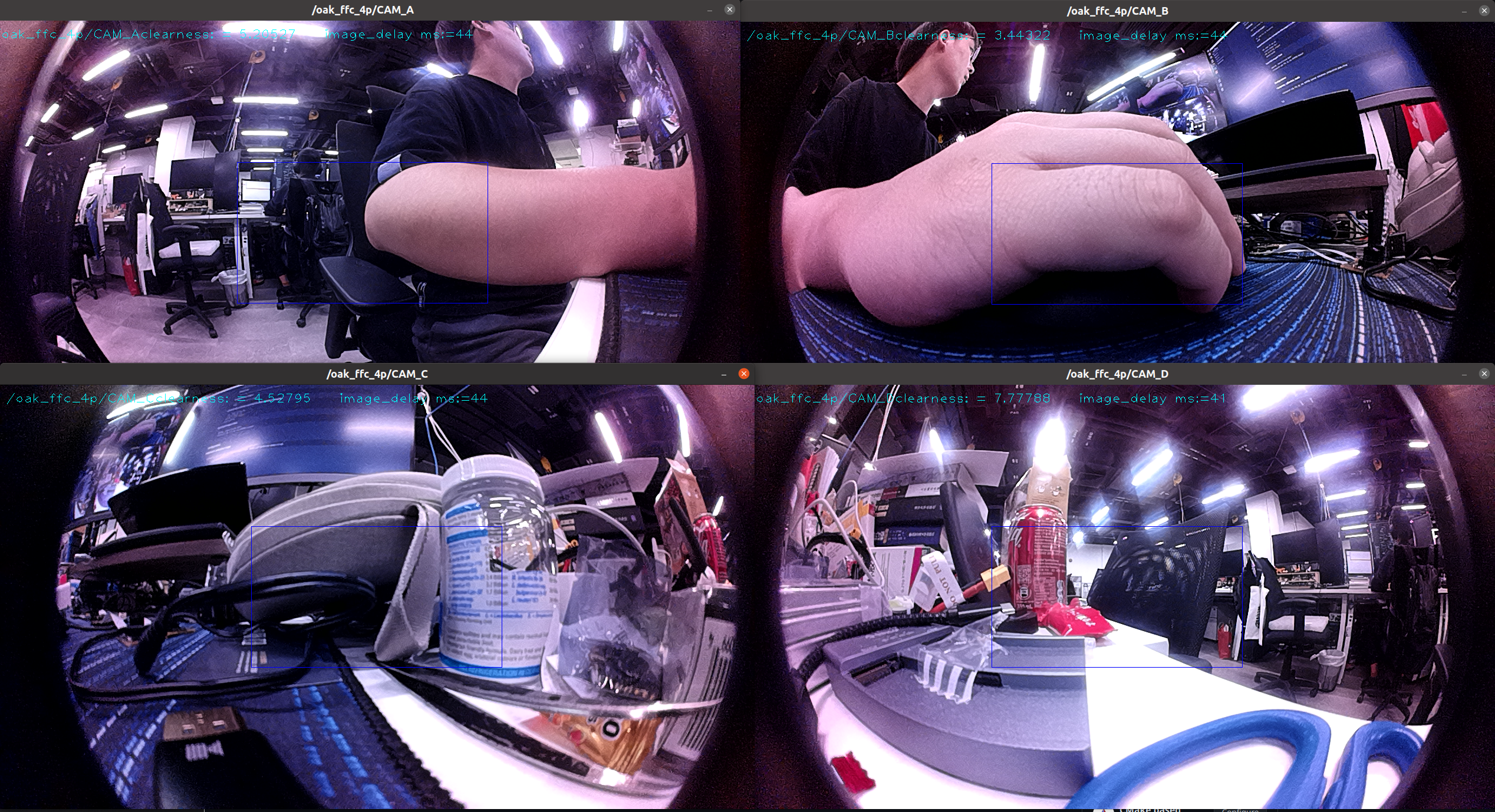
roslaunch oak_ffc_4p_ros OV9782.launch roslaunch oak_ffc_4p_ros OV9782.launch sharpness_calibration_mode:=truee.g
roslaunch oak_ffc_4p_ros OV9782.launch