An autonomous parking agent that can fully navigate a simulated enviroment whilst detecting and reporting liscense plates, a project created for ENPH353
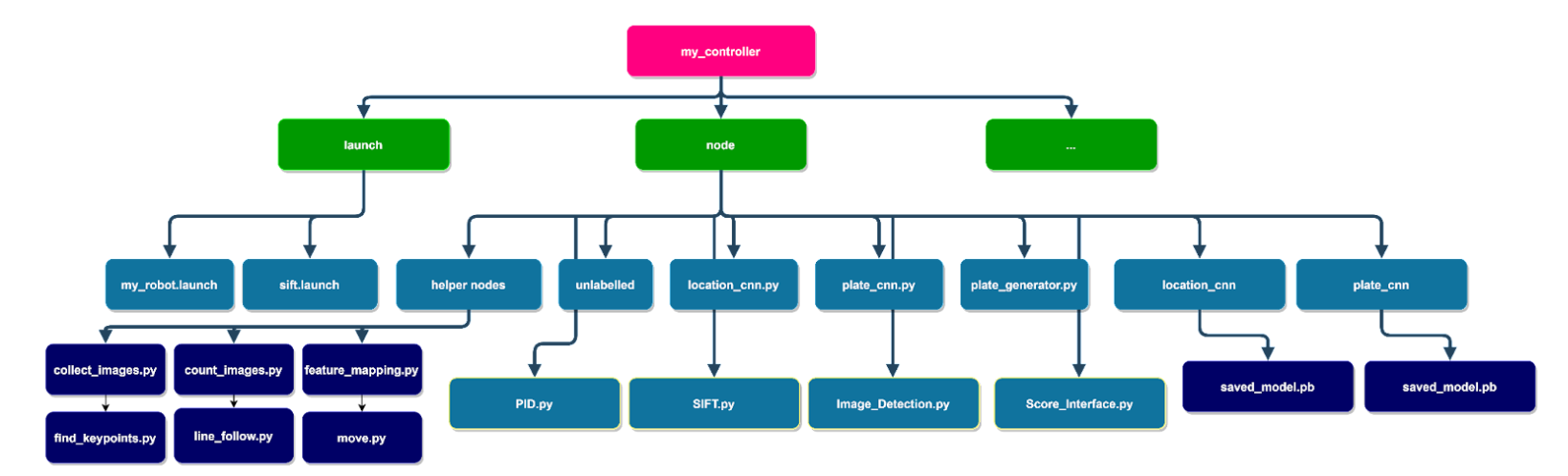
| Source File | Description |
|---|---|
| PID.py | Used for autonomous robot control, in order to navigate it around the competition surface |
| Image_Detection.py | Used to collect liscense plates while navigating around the surface |
| SIFT.py | Used to process the data afterwards, performing SIFT, perspective transforms, and character detection through CNNs |
| location_cnn.py | Used to train the location CNN, which is located in the /location_cnn folder |
| plate_cnn.py | Used to train the location CNN, which is located in the /plate_cnn folder |
| score_interface.py | Used to start and stop the timer used in the competition, allowing for a execution under the time limit |
| plate_generator.py | Used for generating raw data for the liscense plates used in the competition |
All additional helper functions in helper nodes were used to ensure proper code decomposition and reuse
This repository was created for ENPH353, a competition based course that involves engineering project planning, execution and reporting. The course involves carrying out an open-ended Engineering project to meet specific performance metrics on an industry relevant topic selected by instructors. Reporting on progress is both oral and written.
Additional files of the robot moving and files related to the robot are avaliable on request