![]()
Soil Water balance Inverse Modeling using Remote Sensing
SWIM-RS combines the desirable qualities of remote sensing and hydrological modeling into an easy-to-use, rigorous water use modeling system.
SWIM-RS is a toolkit for field-scale soil water balance using remote sensing (Landsat/Sentinel NDVI/ETf) and gridded meteorology (GridMET/ERA5) data sources, packaged into easy-to-manage containers with provenance and coverage checks. The process engine uses numba-accelerated FAO-56 kernels; calibration is field-level via PEST++ IES (ensemble ETf optional). A 40-year run on a single field completes in under a second; shipped examples run end-to-end with a few commands.
All you need is a shapefile of agricultural fields or any other polygons covering a land surface. SWIM-RS will export the meteorology, soil properties, and remote sensing products, build the necessary input data structure, calibrate a model, and provide state-of-the-art estimates of hydrological fluxes (evapotranspiration, precipitation, groundwater recharge, snow accumulation and melt). SWIM-RS simulates irrigation and groundwater use by vegetation. All in a few commands with very little file management and hassle for the user.
The Workflow
swim extract (EE + met) → swim prep (build .swim container) → build_swim_input (HDF5) → run_daily_loop / calibrate
flowchart LR
EE["EE exports<br/>NDVI/ETf"] --> C[".swim container"]
Met["GridMET/ERA5"] --> C
Props["SSURGO/CDL/LANID"] --> C
C --> H5["SwimInput (HDF5)"]
H5 --> Loop["run_daily_loop / PEST++"]
See the Installation Guide for detailed setup instructions including conda, PEST++, and Earth Engine authentication.
Quick install (uv, recommended; Python 3.13):
mkdir swim-rs && cd swim-rs
uv init --python 3.13
uv add git+https://github.com/dgketchum/swim-rs.git
# Calibration requires PEST++ binaries
mkdir -p bin
uv run python -c "from pyemu.utils import get_pestpp; get_pestpp('./bin')"
export PATH="$PWD/bin:$PATH"Alternative (conda):
conda create -n swim python=3.13 -y && conda activate swim
conda install -c conda-forge pestpp geopandas rasterio -y
pip install git+https://github.com/dgketchum/swim-rs.gitWith uv (recommended):
uv sync --extra dev
pytest
# Coverage (line + branch)
pytest --cov=swimrs --cov-branch --cov-report=term-missingAlternative (pip):
pip install -e ".[dev]"
pytestBy default, tests requiring Earth Engine auth are skipped; run them with pytest --run-ee.
Starting from scratch? See How-To Guide for data extraction and a full walkthrough.
This example uses shipped data — no Earth Engine access required.
# Clone the repo for example data
git clone https://github.com/dgketchum/swim-rs.git && cd swim-rs
# Build container from shipped data
swim prep examples/2_Fort_Peck/2_Fort_Peck.toml --overwrite
# Run calibration (requires PEST++)
swim calibrate examples/2_Fort_Peck/2_Fort_Peck.toml --workers 6 --realizations 20
# Run model and write output CSV
swim evaluate examples/2_Fort_Peck/2_Fort_Peck.toml
# Visualize vs flux tower
python examples/2_Fort_Peck/viz.py --results examples/2_Fort_Peck --site US-FPe --save examples/2_Fort_PeckOutputs:
examples/2_Fort_Peck/US-FPe.csv— daily model outputexamples/2_Fort_Peck/US-FPe_timeseries.png— ET time series vs flux towerexamples/2_Fort_Peck/US-FPe_scatter.png— scatter plot with R² and RMSE
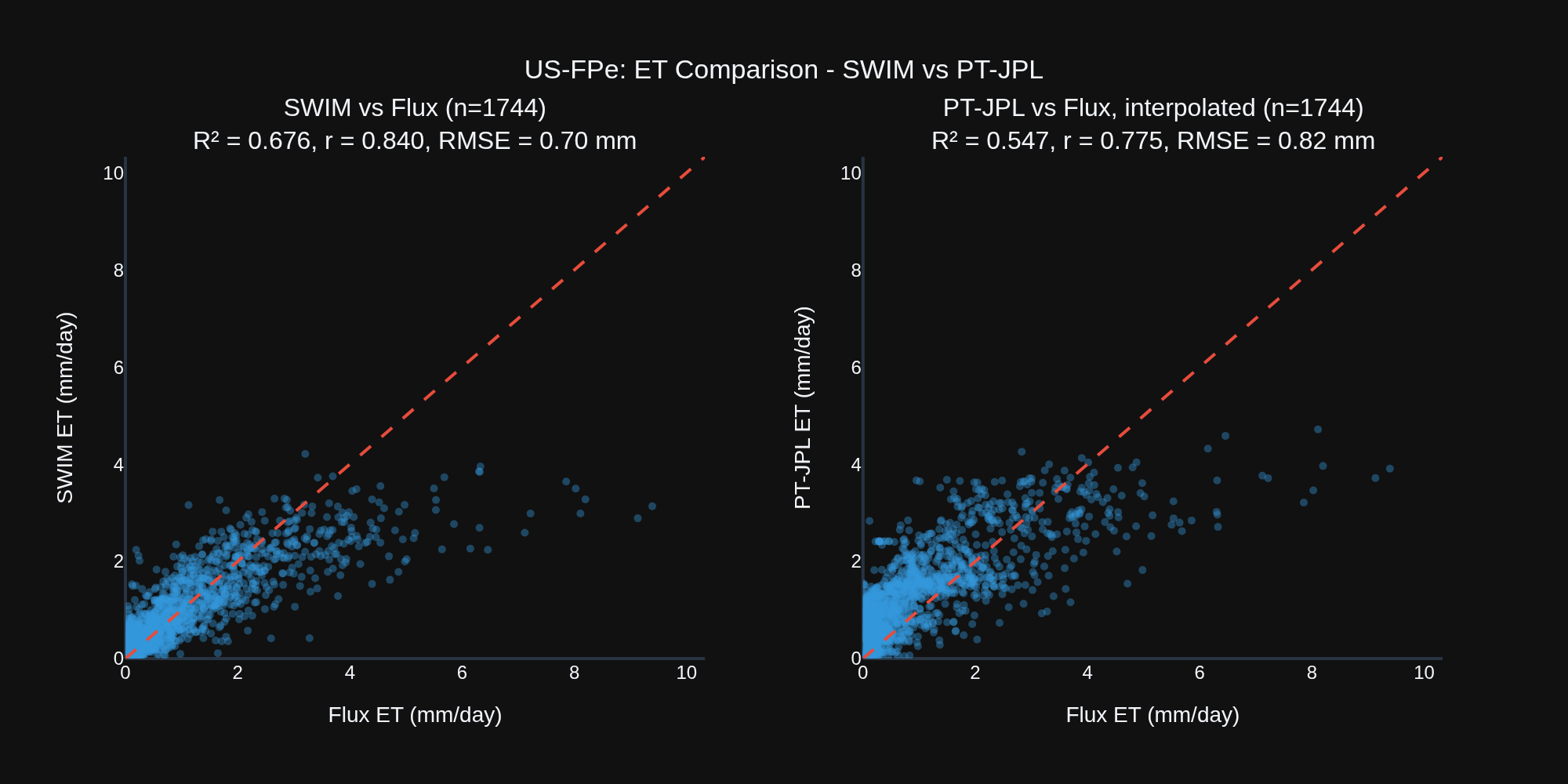
SWIM-RS uses remote sensing ET to calibrate a process-based model rather than drive it directly — the result is daily ET estimates that outperform the satellite retrievals they were trained on. Here, SWIM-RS, itself calibrated on PT-JPL, achieves R² = 0.68 vs PT-JPL's 0.55 against flux tower observations, a 24% improvement in explained variance.
Further, we automatically get estimates of snow accumulation and melt, groundwater recharge, runoff, and consumption of irrigation-applied water (in cases where irrigation is detected, see Example 3 - Crane, OR).
Flux data from Volk et al., 2023.
-
Unified Framework Combining Remote Sensing Coverage with Hydrologic Process Fidelity — Bridges the spatial coverage and observational power of satellite data with the temporal and physical rigor of process-based soil water balance modeling, enabling field-scale estimation of ET, soil moisture, and irrigation dynamics.
-
Seamless Fusion of Remote Sensing and Water Balance Simulation — Dynamically integrates NDVI (Landsat, Sentinel-2) and ET fraction (OpenET/PT-JPL, SSEBop, SIMS) into a FAO-56 dual crop coefficient framework, allowing remote sensing to inform both transpiration and evaporation components on a daily basis.
-
OpenET Ensemble Integration for Calibration and Benchmarking — Uses multimodel, open source OpenET ensemble members (PT-JPL, SSEBop, SIMS, geeSEBAL) for calibration targets and evaluation metrics, supporting robust comparison across algorithms and against ground truth.
-
Flexible Workflows: Irrigation Classification or LULC-Only Modes — Supports both irrigation-mask workflows (e.g., via LANID/IrrMapper in CONUS) and non-mask modes suitable for international contexts using only land cover and NDVI/ETf time series.
-
Physically-Bounded Kernels for Hydrologic Processes — Implements all major components (snowmelt, infiltration, runoff via curve number and infiltration excess, root dynamics, evaporation, and transpiration) using physically consistent and testable numerical kernels.
-
Validation Across 160+ Flux Tower Sites — Field-scale results benchmarked against observed ET from eddy covariance towers, with daily and monthly comparisons to SSEBop and OpenET ensembles. RMSE and R² logged per site/month with automatic diagnostics.
-
Container-Based Data Management with Built-In Provenance — All inputs (remote sensing, met, soils, snow, derived features) are stored in a single Zarr-based
.swimfile, with audit logging, coverage tracking, and spatial indexing, enabling traceable and reproducible modeling workflows. -
Portable HDF5 Inputs for Simulation and Calibration — A single HDF5 file (
swim_input.h5) is generated per project or worker and contains all data needed to run simulations or calibrations independently of the original container or filesystem. -
Native OpenET Model Support — Request OpenET (open source) ensemble members (PT-JPL, SIMS, SSEBop, and geeSEBAL) to run on OpenET software in the background directly from SWIM-RS.
-
Fast, Modular Simulation Engine Using Numba JIT — Implements core model kernels as Numba-accelerated functions, achieving 5–10× speedups over standard NumPy code and enabling daily simulations over decades for hundreds of fields in seconds.
-
End-to-End Integration with PEST++ IES — Includes built-in support for spinup, control file generation, localization, and parameter bounds for Iterative Ensemble Smoother–based calibration, directly from container inputs.
-
CLI-Driven Workflow with TOML Configs — Unified command-line interface (
swim) supports data extraction, container building, simulation, calibration, and evaluation, all driven by compact and versioned TOML config files. -
Full Audit Trail and Inventory — Every ingest and compute step records metadata, input source, time, and affected fields. Combined with inventory validation and xarray-backed data views, this supports complete transparency from source to output.
-
Structured, Extensible, and Tested Codebase — Test-driven design with explicit deprecation handling, parity checks, and typed dataclasses for state, parameters, and properties. Easily extensible for future snow, ET, or runoff modules or input sources.
src/swimrs/container— Zarr container (ingest/compute/export/query)src/swimrs/process— Simulation engine, HDF5SwimInput, daily loopsrc/swimrs/cli.py—swimCLI (extract, prep, calibrate, evaluate, inspect)src/swimrs/calibrate— PEST++ builders/runnerssrc/swimrs/data_extraction— Earth Engine + meteorology utilitiessrc/swimrs/swim— config parsing and helpers
| Example | Description | README |
|---|---|---|
| 1_Boulder | End-to-end tutorial demonstrating the SwimContainer API for data ingestion, computation, and model execution using a small study area near Boulder, Montana. Includes 5 notebooks covering container creation, data extraction, ingestion, dynamics computation, and model runs. Works with or without Earth Engine access. | README |
| 2_Fort_Peck | Single-site calibration tutorial for the US-FPe flux tower (unirrigated grassland). Demonstrates uncalibrated model runs, PEST++ IES calibration using PT-JPL ETf and SNODAS SWE, and validation against flux tower observations. Shipped data included — no EE required. | README |
| 3_Crane | Irrigated site calibration tutorial for an alfalfa field at Crane, Oregon. Similar workflow to Fort Peck but demonstrates irrigation dynamics, crop coefficient calibration, and ensemble ETf targets. | README |
| 4_Flux_Network | Full CONUS flux network workflow (~160 stations). Production-scale container build, calibration, and evaluation using Landsat NDVI, SSEBop ETf, GridMET, SNODAS, and SSURGO. Includes scripts for group calibration and flux/SSEBop comparisons. | README |
| 5_Flux_Ensemble | Cropland subset (~60 stations) with OpenET ensemble calibration. Compares SWIM against SSEBop, PT-JPL, and SIMS ensemble targets. Includes OpenET evaluation scripts and cropland filtering utilities. | README |
| 6_Flux_International | International flux sites using ERA5-Land meteorology, HWSD soils, and Landsat+Sentinel NDVI fusion. Demonstrates non-CONUS workflows with mask_mode = "none" and global data sources. |
— |
swim extract <config.toml>— Earth Engine + GridMET/ERA5 exports (Drive or bucket)swim prep <config.toml>— ingest into.swim, compute dynamics, export model inputsswim calibrate <config.toml>— build/run PEST++ IES (requires container)swim evaluate <config.toml>— debug run, per-site CSVs, optional metrics vs flux/OpenETswim inspect <container.swim>— container coverage/provenance report
Common flags: --out-dir (override project root), --sites (restrict IDs), --workers (parallel steps),
--add-sentinel, --use-lulc-irr / --international (no-mask workflows).
- Data extraction (EE): Landsat/Sentinel NDVI, ET fraction from OpenET/USGS-NHM, CDL/LANID irrigation, SSURGO/HWSD, ERA5-Land daily variables. See Data Extraction Guide for API details.
- Meteorology: GridMET or ERA5-Land daily forcing; optional bias corrections.
- Container compute: merged NDVI, irrigation windows, groundwater subsidy, crop dynamics.
- Modeling: daily SWB with snow, runoff (CN or infiltration-excess), NDVI→Kcb, dynamic Ke/Ks, irrigation scheduling, root growth.
- Calibration: PEST++ IES via pyemu; writes obs/preds and manages worker/master runs.
- Forecasting/analysis/viz: NDVI analog forecasts; metrics vs flux and OpenET; Plotly visualizations.
Each project is configured with a TOML file. See docs/template.toml for a starter template and the How-To Guide for detailed documentation of all configuration options.
Example TOMLs are also available in the examples/ subdirectories.
This software is free and open source under the Apache 2.0 license.
The software uses third-party libraries subject to their own licenses (e.g., Apache-2.0 in the upstream codebase). Ensure compliance with these dependencies per their terms.
Disclaimer: The licensing information is for informational purposes only. Consult the full license texts and seek legal advice for specific questions about licensing or compliance.