{kind=link}
{kind=link}
{kind=link}
{kind=link}
Self-Balancing Robot: https://www.youtube.com/watch?time_continue=1&v=wG_vcWqeqLw
This project aimed to design, construct and program a self-balancing robot. The following objectives have been set:
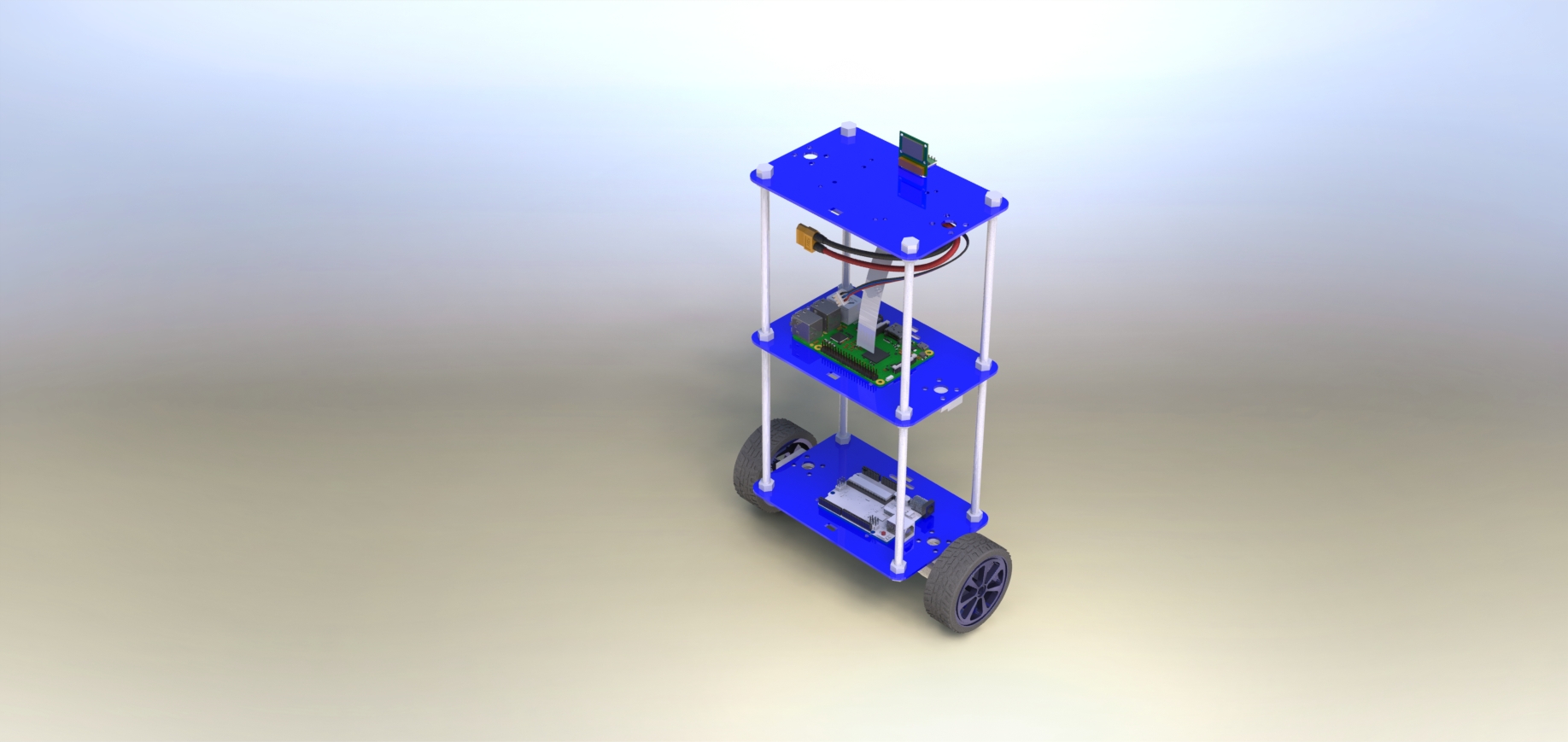
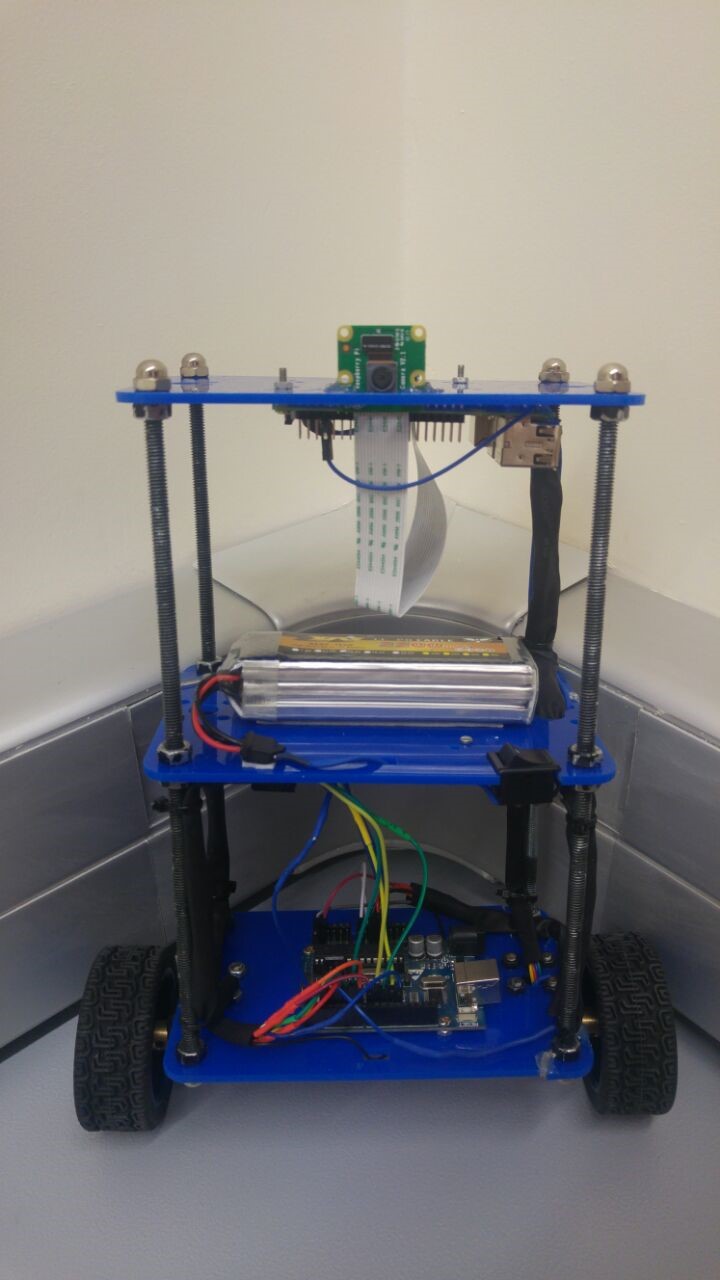
- Design and assemble the chassis of the robot
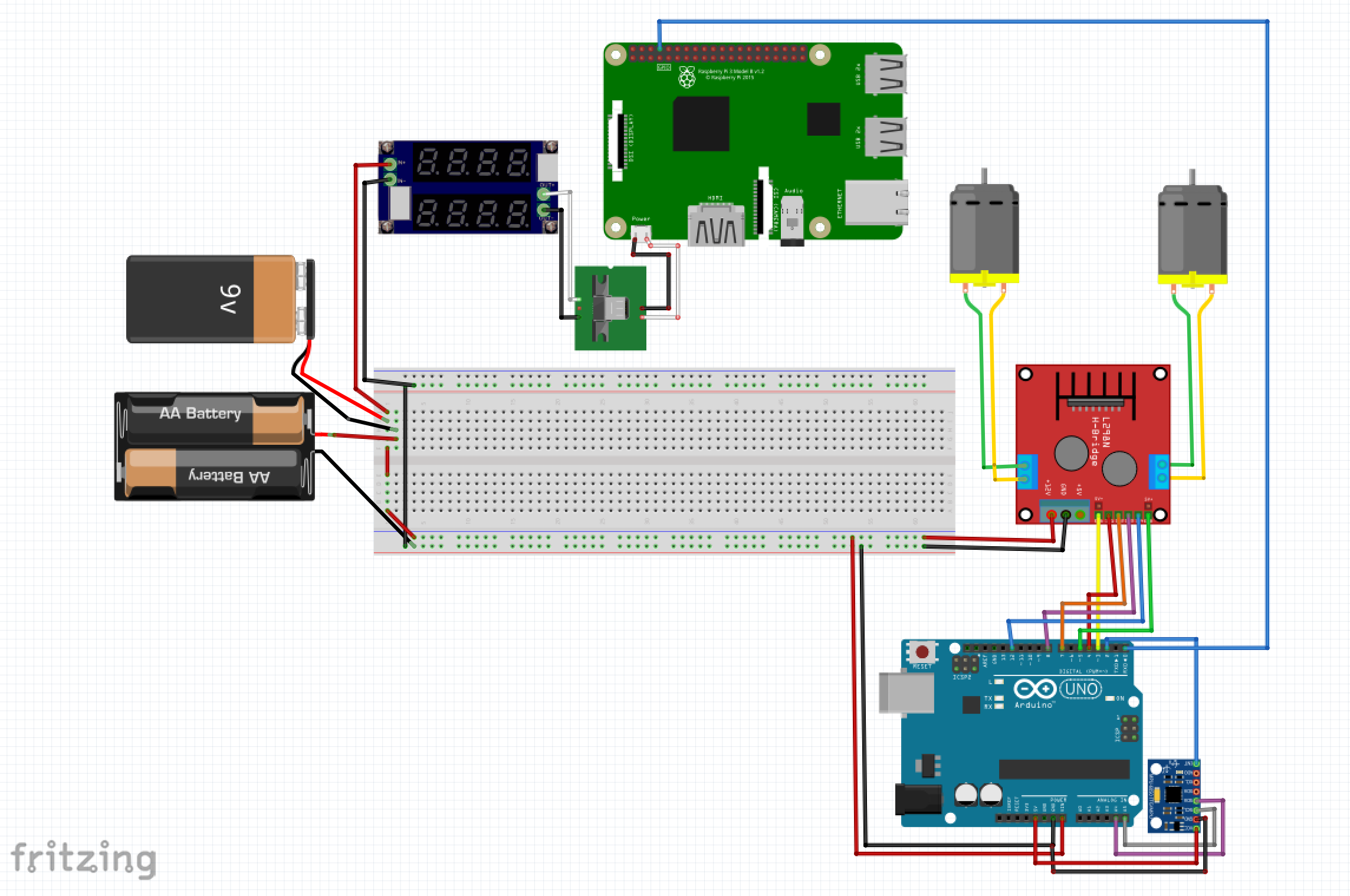
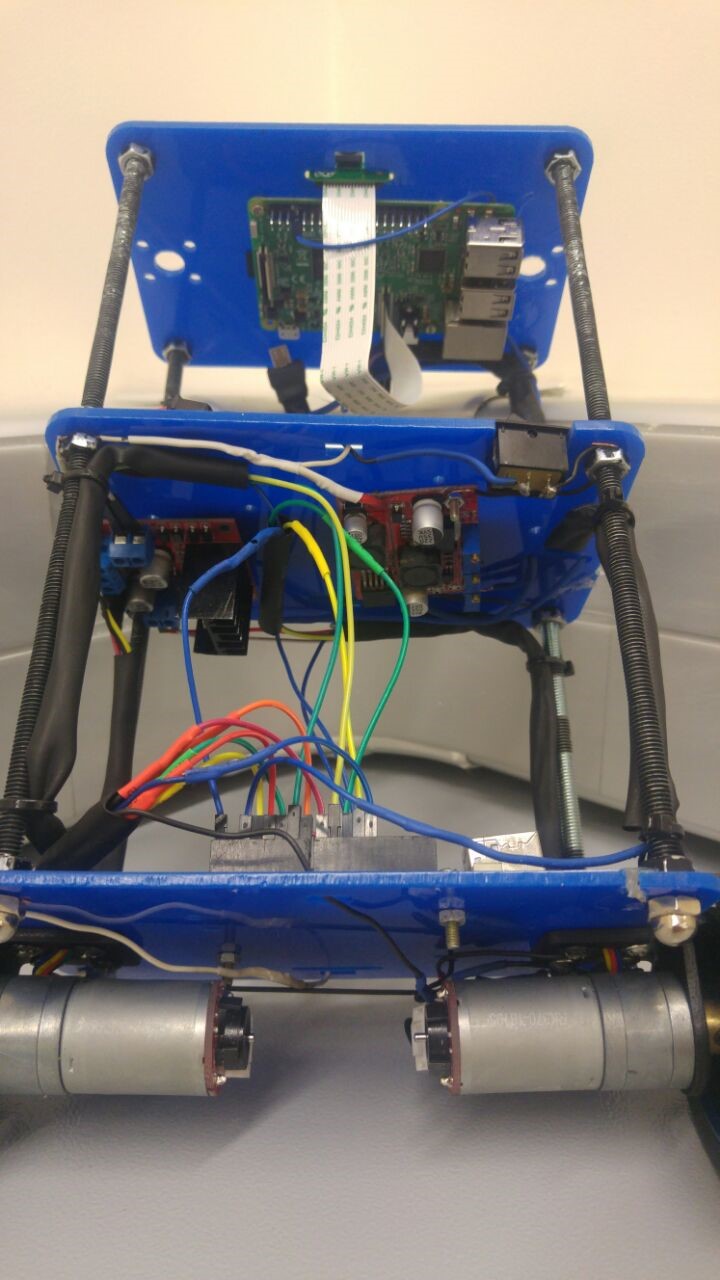
- Mount all the electronic hardware on the chassis and make all the electrical connections
- Develop the software to read from the sensors and to control the actuators
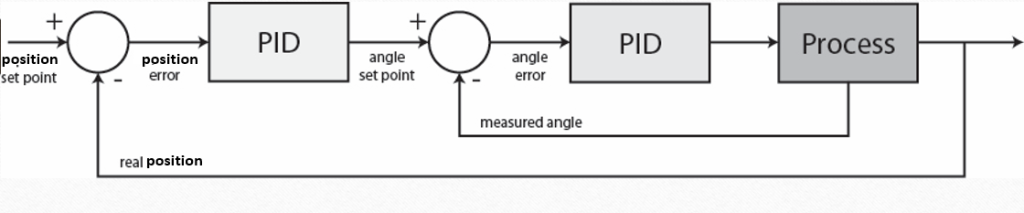
- Implement a PID controller to enable the robot to stay upright
- Implement a PID controller to enable the robot to return to move
- Develop the software for wireless control and camera streaming