Help needed on rmf_obstacle_laserscan_detector #9
Description
Hi
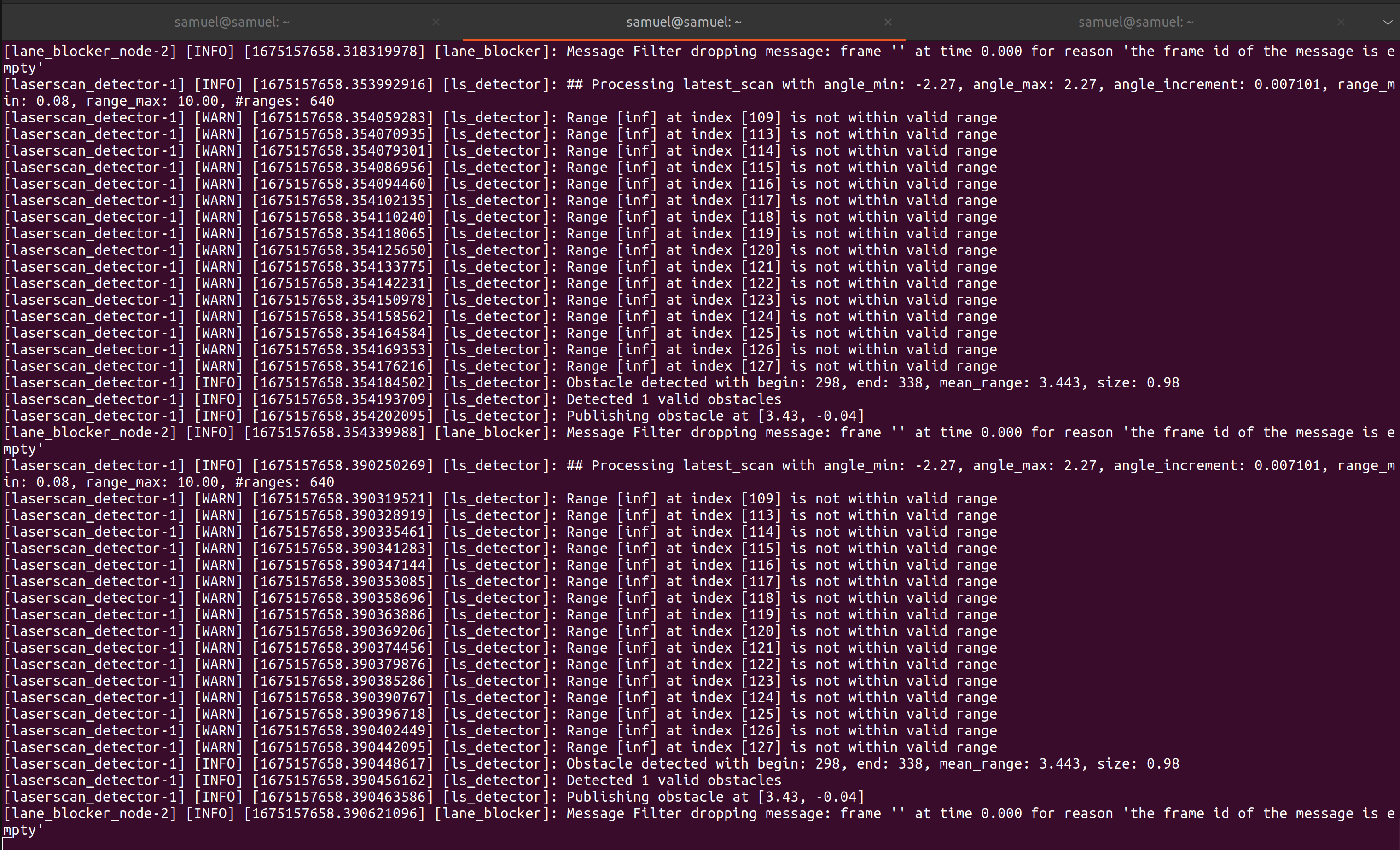
I managed to have everything compiled, it shown hooked up on rqt node_graph. However when i place an obstacle in front of laserscanner, it complaints about no frame_id for header when being subscribed into lane_blocker node.
Complaint message from Lane Blocker
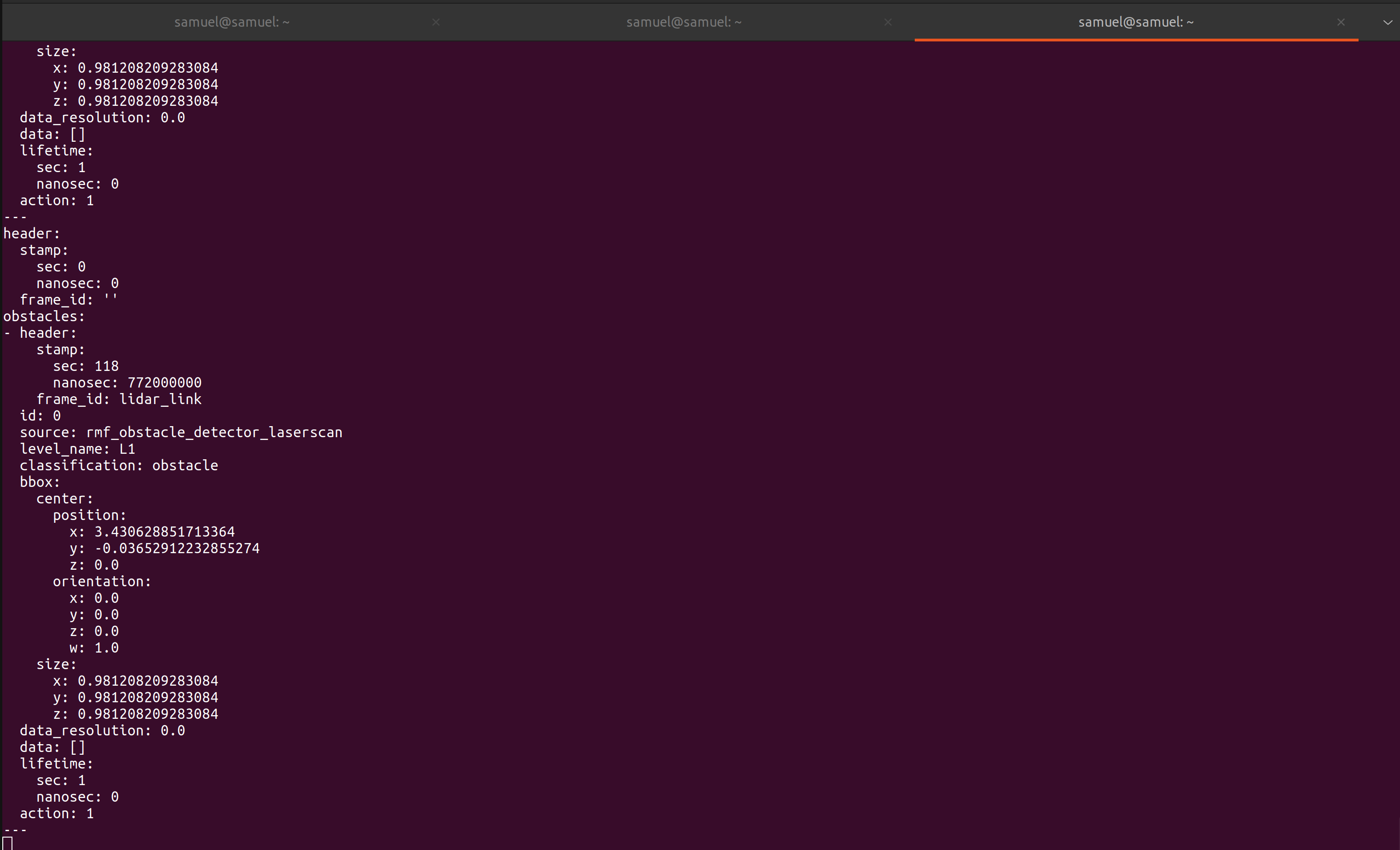
ROS2 topic echo of /rmf_obstacles
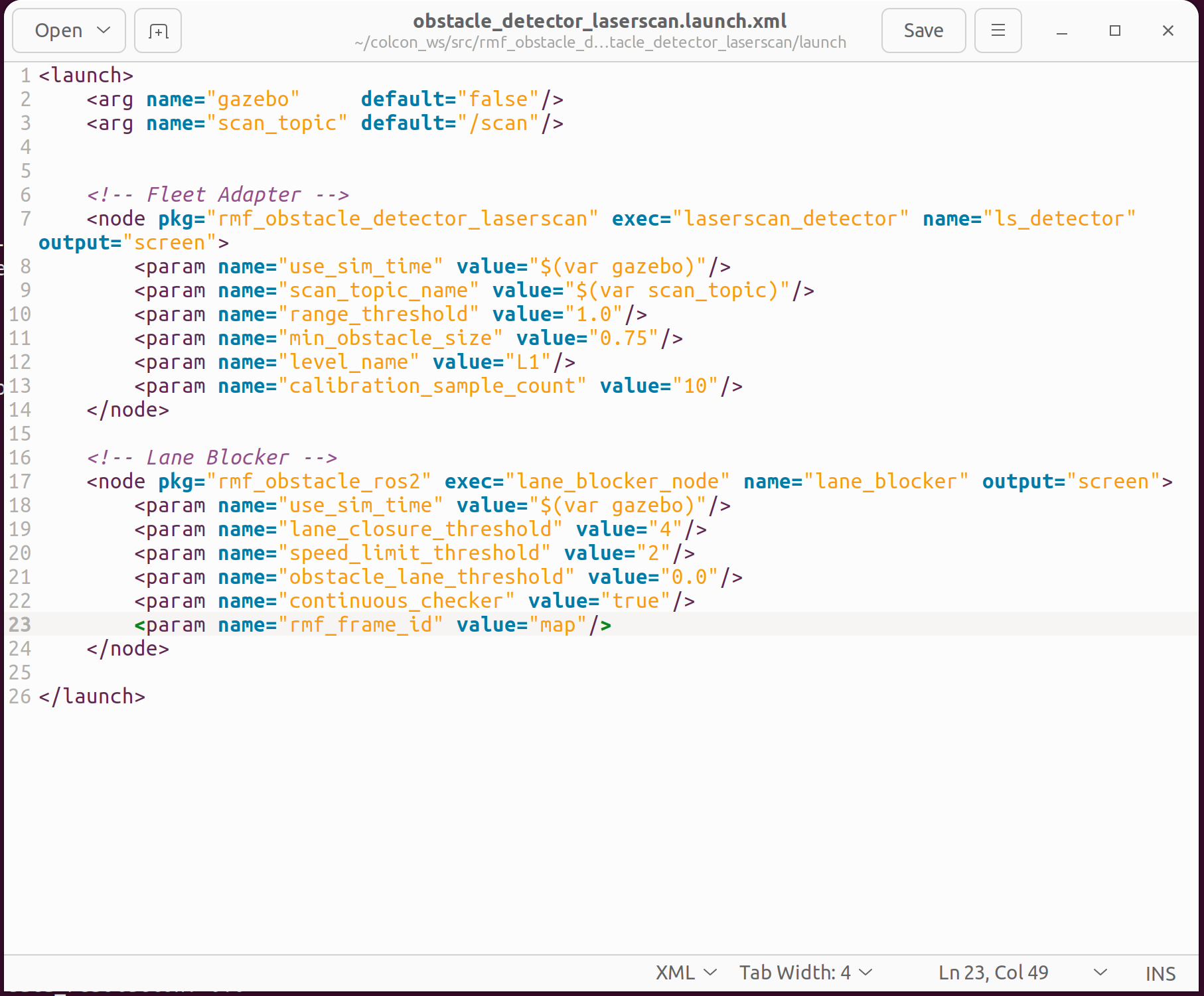
Launch File settings
How shall i fill the frame_id for header msg of topic /rmf_obstacles ?
Best,
Samuel