
![]()
Newton is a GPU-accelerated physics simulation engine built upon NVIDIA Warp, specifically targeting roboticists and simulation researchers.
Newton extends and generalizes Warp's (deprecated) warp.sim module, and integrates
MuJoCo Warp as its primary backend. Newton emphasizes GPU-based computation, OpenUSD support, differentiability, and user-defined extensibility, facilitating rapid iteration and scalable robotics simulation.
Newton is a Linux Foundation project that is community-built and maintained. Code is licensed under Apache-2.0. Documentation is licensed under CC-BY-4.0. Additional and third-party license texts are available in newton/licenses.
Newton was initiated by Disney Research, Google DeepMind, and NVIDIA.
- Python 3.10+
- OS: Linux (x86-64, aarch64), Windows (x86-64), or macOS (CPU only)
- GPU: NVIDIA GPU (Maxwell or newer), driver 545 or newer (CUDA 12). No local CUDA Toolkit installation required. macOS runs on CPU.
For detailed system requirements and tested configurations, see the installation guide.
pip install "newton[examples]"
python -m newton.examples basic_pendulumTo install from source with uv, see the installation guide.
Before running the examples below, install Newton with the examples extra:
pip install "newton[examples]"If you installed from source with uv, substitute uv run for python in the commands below.
|
|
|
python -m newton.examples basic_pendulum
|
python -m newton.examples basic_urdf
|
python -m newton.examples basic_viewer
|
|
|
|
python -m newton.examples basic_shapes
|
python -m newton.examples basic_joints
|
python -m newton.examples basic_conveyor
|
|
|

|
python -m newton.examples basic_heightfield
|
python -m newton.examples recording
|
python -m newton.examples replay_viewer
|
|
||
python -m newton.examples basic_plotting
|
||
|
|
|
python -m newton.examples robot_cartpole
|
python -m newton.examples robot_g1
|
python -m newton.examples robot_h1
|
|

|
|
python -m newton.examples robot_anymal_d
|
python -m newton.examples robot_anymal_c_walk
|
|
|
|
|
python -m newton.examples robot_policy
|
python -m newton.examples robot_ur10
|
python -m newton.examples robot_panda_hydro
|
|
||
python -m newton.examples robot_allegro_hand
|
||

|
|
|
python -m newton.examples cable_twist
|
python -m newton.examples cable_y_junction
|
python -m newton.examples cable_bundle_hysteresis
|
|
||
python -m newton.examples cable_pile
|
||
|
|

|
python -m newton.examples cloth_bending
|
python -m newton.examples cloth_hanging
|
python -m newton.examples cloth_style3d
|

|
|
|
python -m newton.examples cloth_h1
|
python -m newton.examples cloth_twist
|
python -m newton.examples cloth_franka
|
|
|
|
python -m newton.examples cloth_rollers
|
python -m newton.examples cloth_poker_cards
|
|
|
|
|
python -m newton.examples ik_franka
|
python -m newton.examples ik_h1
|
python -m newton.examples ik_custom
|
|
||
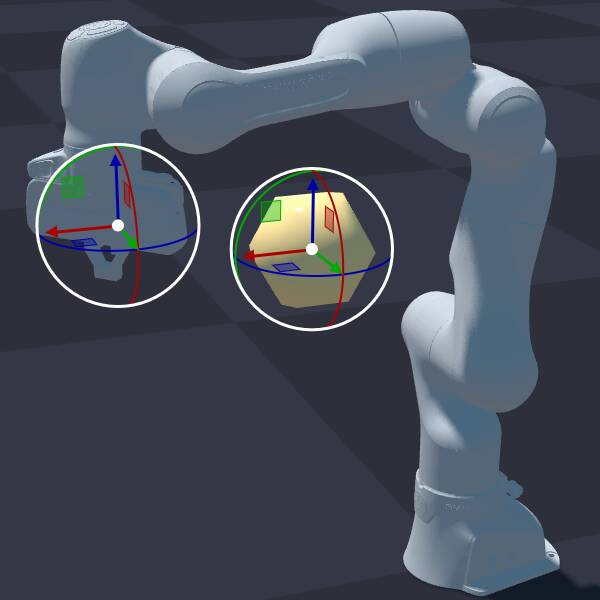
python -m newton.examples ik_cube_stacking
|
||
|
|
|
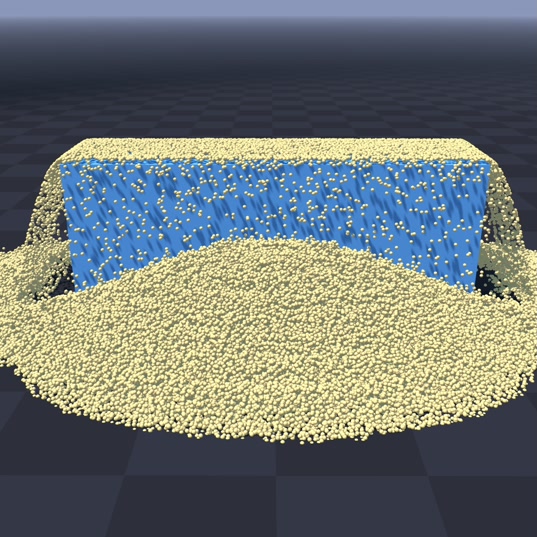
python -m newton.examples mpm_granular
|
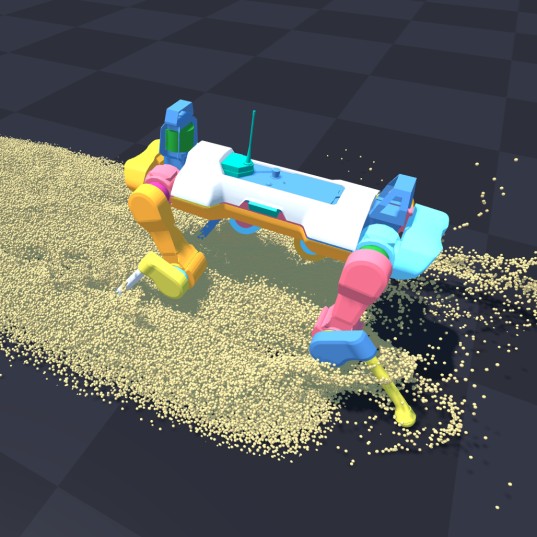
python -m newton.examples mpm_anymal
|
python -m newton.examples mpm_twoway_coupling
|
|
|

|
python -m newton.examples mpm_grain_rendering
|
python -m newton.examples mpm_multi_material
|
python -m newton.examples mpm_viscous
|
|
|
|
python -m newton.examples mpm_beam_twist
|
python -m newton.examples mpm_snow_ball
|
|
|
|
|
python -m newton.examples sensor_contact
|
python -m newton.examples sensor_tiled_camera
|
python -m newton.examples sensor_imu
|
|
|
|
python -m newton.examples selection_cartpole
|
python -m newton.examples selection_materials
|
python -m newton.examples selection_articulations
|
|
||
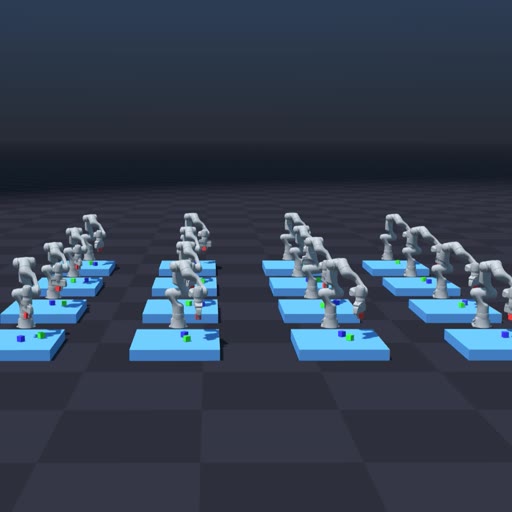
python -m newton.examples selection_multiple
|
||
|
|
|
python -m newton.examples diffsim_ball
|
python -m newton.examples diffsim_cloth
|
python -m newton.examples diffsim_drone
|
|
|

|
python -m newton.examples diffsim_spring_cage
|
python -m newton.examples diffsim_soft_body
|
python -m newton.examples diffsim_bear
|

|
|
|
python -m newton.examples softbody_gift
|
python -m newton.examples softbody_dropping_to_cloth
|
|

|
|
|
python -m newton.examples nut_bolt_hydro
|
python -m newton.examples nut_bolt_sdf
|
python -m newton.examples brick_stacking
|
|
||
python -m newton.examples pyramid
|
||

|
|
|
python -m newton.examples softbody_hanging
|
python -m newton.examples softbody_franka
|
|
The examples support the following command-line arguments:
| Argument | Description | Default |
|---|---|---|
--viewer |
Viewer type: gl (OpenGL window), usd (USD file output), rerun (ReRun), or null (no viewer). |
gl |
--device |
Compute device to use, e.g., cpu, cuda:0, etc. |
None (default Warp device) |
--num-frames |
Number of frames to simulate (for USD output). | 100 |
--output-path |
Output path for USD files (required if --viewer usd is used). |
None |
Some examples may add additional arguments (see their respective source files for details).
# List available examples
python -m newton.examples
# Run with the USD viewer and save to my_output.usd
python -m newton.examples basic_viewer --viewer usd --output-path my_output.usd
# Run on a selected device
python -m newton.examples basic_urdf --device cuda:0
# Combine options
python -m newton.examples basic_viewer --viewer gl --num-frames 500 --device cpuSee the contribution guidelines and the development guide for instructions on how to contribute to Newton.
For questions, please consult the Newton documentation first before creating a discussion in the main repository.
By participating in this community, you agree to abide by the Linux Foundation Code of Conduct.
Please see the newton-governance repository for more information about project governance.